マニピュレーション研究室
担当教員/小澤 隆太・ Van Heerden KiriII
ロボットにおけるマニピュレーションとは、ロボットを用いて物体を操作することを意味します。物体操作は、ロボットと物体・環境・人間・他のロボット等の物理的な接触を伴い、様々な動作が要求されます。そのため、ロボットが接触対象を傷つけることなく様々な作業を行うために、十分な運動能力を持つロボットのハードウェア(機構)と適切にロボットを動かすためのソフトウェア(制御系)の両方が必要となります。機構の設計においては、特に、その伝達機構を工夫することで、少ないモータで人間の特徴的な動きを実現できるロボットハンドなどの開発を行っています。制御系開発では、ロボットハンド、アーム、歩行ロボットなどそれぞれの物理的な特徴をとらえることにより、安定かつ実装が容易な方法の開発を目指しています。
指ロボットの遠隔操作

指ロボットの写真
運動知能研究室
担当教員/川村 貞夫・河村 晃宏
多関節・多自由度のロボットの運動科学とその応用を研究テーマとしている。機構、情報処理、制御理論等を基盤にロボットシステム化の科学・技術を目的としている。
①水中ロボットの製作・制御および湖・海での実験/水中ハンドリング、海湖底からの採泥、水中遺跡探査等を目的とした小型水中ロボットを開発し、琵琶湖や海での実験を行っている。
②空・水圧駆動ロボットシステム/空気圧駆動、水圧駆動により極軽量ロボット、水中用ロボットアームなどの新しいメカニズム開発と制御法を提案している。
③共振現象に基づく省エネルギーロボット/重力や機械的弾性要素に蓄えたポテンシャルエネルギーを効果的に利用したエネルギー効率の高いロボットの制御理論と産業用ロボットへの応用を行っている。
④感覚と運動の統合によるロボット運動制御/視覚・触覚等の感覚情報から運動に至るシンプルでロバストな運動制御手法を提案し、その有効性を理論的・実験的に証明する。

自重500gの軽量ロボット アーム

小型水中ロボット
ヒューマノイドシステム研究室
担当教員/玄 相昊・有木 由香
人間と同等の運動性能を持つヒューマノイドロボットの研究開発を通じて、人間の高度な運動メカニズムを探求し、その知見を人々の暮らしに役立てることを目指しています。ソフト面では制御理論、力学理論、学習理論、ハード面では油圧技術を駆使しています。現在、パワフルで高速な等身大ヒューマノイドロボットを独自に開発し、様々なセンサーで環境を認識しつつ全身で巧みにバランスをとったり、人の高速な全身運動をその場で真似してみせる方法を研究しています。 また、ヒューマノイドの制御技術を活かしたバランスアシストロボットや、油圧駆動4脚ロボット、ロボットショベル等を研究開発しています。
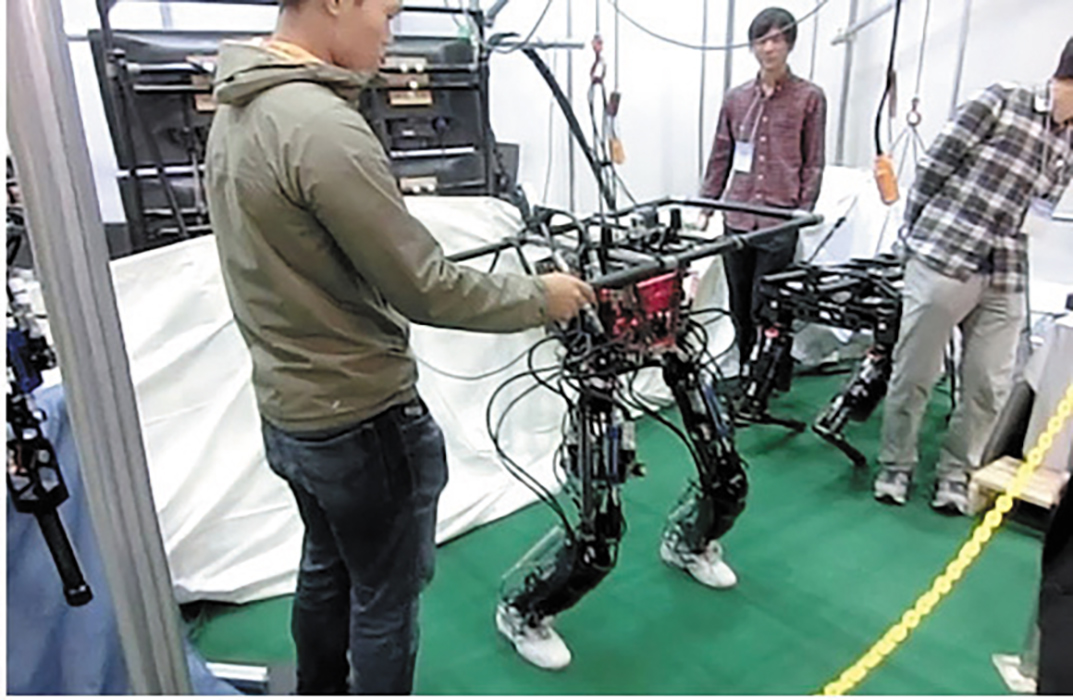
油圧駆動ヒューマノイドロボット (国際ロボット展)
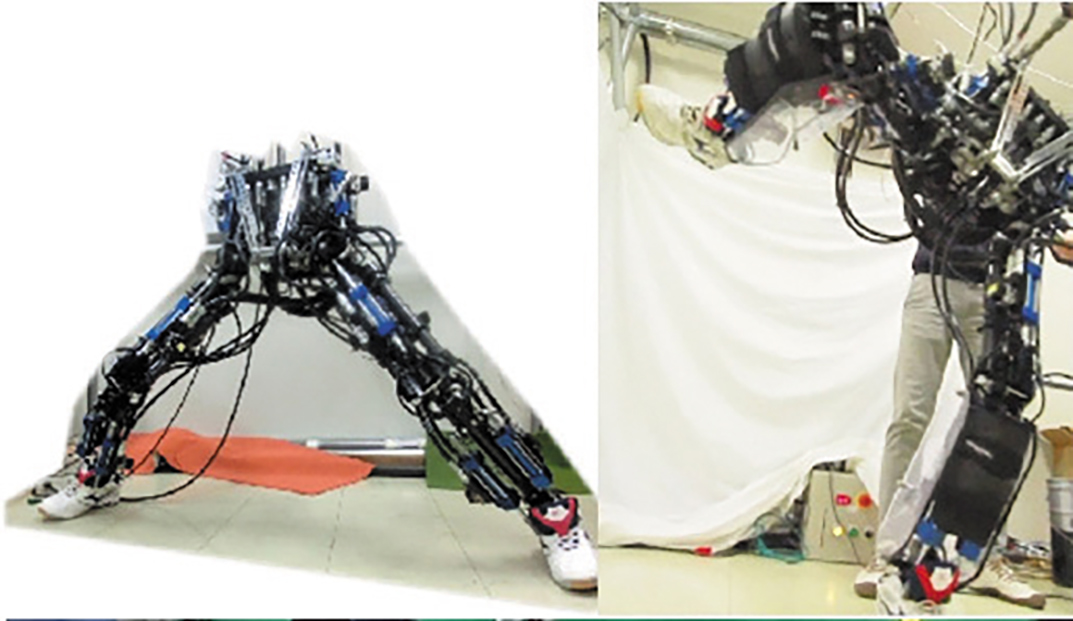
正確で力強い「蹴り」のマスターを目指して
センサ知能統合研究室
担当教員/下ノ村 和弘
ロボットが自身の状態や外界の情報を知るためには、視覚や触覚のような、人間の感覚器に相当する機能を持つことが必要です。本研究室では、これを実現するためのセンサとその情報処理技術について、特にビジョン(視覚)の機能を中心とした研究に取り組んでいます。具体的には、生物の視覚系をモデルにした知能イメージセンサ(ビジョンチップ)、集積回路技術を用いたリアルタイム画像処理システム、照明光の変化や対象物の見えの変化に対してロバストな物体追跡アルゴリズム、異なる種類のセンサを組み合わせて計測の信頼性を上げる技術(センサフュージョン)の開発、また、これらのセンシング技術を用いたロボットヘッドや飛行ロボットの制御など、センサデバイスの開発からロボット制御への応用まで幅広く研究を行っています。
ビジョンチップと(左)とその出力画像(右)

ステレオビジョンによる物体追跡

福祉工学研究室
担当教員/手嶋 教之
障害者や高齢者のための福祉機器の開発と、そのための基礎研究を行っています。日本中の理工系研究室の中で市販の福祉機器を一番多く保有していると自負しています。なぜかというと、実際によく使われている機器を試してそれぞれの機器の優れている所や問題点を体験してもらうことが、福祉機器の研究には特に重要だからです。その上でその市販の機器を超えるようなアイデアを考えて、試作し、実際の使用者によって評価をしてもらいます。ロボティクス学科に属していますが、ロボットに限らず、単純な道具でもいいから本当に役立つ機器の開発を目指していて、たとえば福祉ロボットのための安全機構、高齢者に適したゲーム、快適な車いす用クッション、四肢まひ者が頭を使って操作するための格好いい操作用スイッチなどの研究・開発をしています。
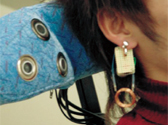
試作したイヤリング型入力装置

高齢者にラジコンで遊んでもらっている実験風景
ロボティクス研究室
担当教員/永井 清・土橋 宏規

ロボティクス研究室では、実用化を目指した次世代ロボットシステムの研究・開発に取り組んでいます。
1)リハビリロボットシステム(英国レディング大学との国際共同研究)
脳卒中罹患後の患者に対して運動機能回復訓練を行うためのリハビリロボットシステムの実用化を目指し、上肢を優しく誘導するリハビリロボットや、脳波を用いた運動意図発生の検出システムの開発を行っています。共同研究先のレディング大学には、本研究に従事する学生とともに毎年訪れ、先方の研究者と交流を深めながら研究を進めています。
2)パラレル・メカニズム
生産現場への応用を目指して、加速度100Gの実現を目指す超高加速パラレル・メカニズムNINJAや、高速・高精度なワイヤメカニズムの開発を行っています。また、設置環境に依らず高い感度で力計測可能な並列型力覚センサの開発を行っています。
生活支援メカトロニクス研究室
担当教員/野方 誠
我々の日常生活の質を向上させるために、医用ロボット、高機能小形医療機器、福祉支援機器などの研究を行っています。
【診断治療用体内ロボット】
長期間体腔内に留置され、外部磁場により臓器表面を移動しながら検査や医療行為を行う体内ロボットの研究。柔らかい臓器内で正確な位置決めのできるメカニズム、診断機能、治療機能、移動用の磁場を発生させるシステム、移動シミュレーション、ロボットの挙動解析を行っています。
【低侵襲治療のための術具】
ダメージの少ない臓器外科治療のための術具の開発。外径1mmのマイクロ鉗子を搭載した血管カテーテル、腹腔鏡下手術で使う多機能内視鏡。小形でありながら手術に必要とされる自由度や剛性を有する術具を目指し、設計と製作を行っています。
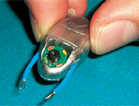
診断治療用体内ロボット30x15x8[mm]、CCDカメラと2本の鉗子を搭載
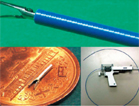
血管カテーテルの先端に搭載される外径1mmのマイクロ鉗子
ソフトロボティクス研究室
担当教員/平井 慎一・ 王 忠奎
ソフトロボティクス研究室では、柔らかい材料で構成されるロボットに関する研究を進めています。われわれの研究で、柔らかい材料を用いることにより、硬い材料で構成されたロボットでは難しかった機能を簡単に実現できることが示されています。柔らかい材料を用いて実世界で賢くしかも逞しく動く物理システムを実現すること、その学術的な理論を確立することを目指しています。将来的に、柔らかい物体や生体材料等を用いたロボットにより、実世界で人のように動く物理システムを実現したいと考えています。
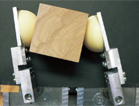
柔軟指操作
柔らかい指先を持つロボットハンドで物体を器用に操作できます。

跳躍移動ソフトロボット
柔らかいボディと柔らかいアクチュエータから構成されているロボットです。
生物知能機械学研究室
担当教員/馬 書根
生物は極めて多くの自由度を持つ身体とそれに対応する知能を有しており、複雑・多様・動的な環境やタスクに柔軟・迅速に対応することができます。本研究室では、このような生物の身体・知能を知能ロボットとして実現するため、生物知能機械、生物型ロボット、及び環境適応機構について研究し、特に未知のパワーを持つ「生物の動き方」をヒントに、人間社会に役立つロボットを開発しています。具体的には、蛇型ロボットや、四脚歩行ロボットなど、生物の身体や運動知能をモデルとしたロボットの研究開発、環境適応クローラ機構、水陸両用ロボット機構、受動吸盤による壁面移動機構など、レスキューロボティクスの研究に取り込んでいます。本研究室は国際色豊かで、多くの国際学生が在籍し、海外研究機関との研究交流も積極的に行っています。
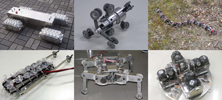
左上:環境適応クローラロボット
上中:管内移動ロボット/右上:蛇型移動ロボット
左下:壁面移動ロボット/下中:四脚歩行ロボット
右下:全方位移動ロボット
生体工学研究室
担当教員/牧川 方昭
人間をロボット工学の立場から次のような研究をしています。①服の上から心電図を測る新しいセンサ技術を開発しています。睡眠の深さを測る(写真①)、ドライバのぼんやり運転、居眠り運転を見つけるなどに応用しようとしています。②動物の体内の状態を直接計測できるシステムなど、超小型の生体計測用ディジタル・コンピュータ・システムの開発をしています。③仮想空間内を散策できる歩行訓練器(写真②)、枕を揺らすことで入眠を早めるなど、生体機能に積極的に働きかけ、健康を回復・維持・増進させる技術を開発しています。④高齢者の転倒防止方法の検討など、生体機能の解明を通した臨床応用研究を実施しています。また、企業との共同研究を積極的に実施している点も本研究室の特長の1つです。

高齢者睡眠モニタリング・システム

バーチャル散策コース