
2010年12月20日更新

- 馬 書根
- 立命館大学理工学部ロボティクス学科教授、びわこ・くさつキャンパス国際センター長

- 工学博士(知能機械学)。1963年中国生まれ。1984年中国・河北工業大学工学部機械工学科卒業。1991年東京工業大学大学院理工学研究科機械物理専攻博士課程修了。小松製作所、カリフォルニア大学などでの研究を経て、2005年から現職。研究テーマは生物知能機械学、環境適応機構と制御。
腕相撲では今でも学生に負けないほどの筋肉を誇る。「でも最近はメタボを意識して自転車に乗ってます。そこはロボットとは違いますからね」
写真/後方は、以前に共同開発した象の鼻型ロボット。「鼻」の部分全体を自由に動かすことができるため、障害物を回避しやすく原子炉やプラント内の複雑な環境下での作業に力を発揮することが期待されている。



-
生物の運動と知能を研究して、馬 書根が生み出したものの一つにヘビ型ロボットがある。スイッチを入れるとクネクネとまさに蛇行を始める。「でも、オモチャを作っているわけではありませんよ」と馬は微笑みながら語り始めた。
最近は本物そっくりに動く魚のロボットなどが開発され、子どもたちの注目を集めているようだが、「私たちは未知のパワーをもつ生物の動き方を研究して、社会に生かすのが目的なのです」という。そういえば新幹線の先頭車両も鳥の嘴を研究して空気抵抗を減少したといわれており、生物から学べることは少なくない。
それと同じように、馬がヘビ型ロボットを作ったのは、クルマでは立ち往生するような場所での最適な移動方法を見つけるためだ。クルマの車輪は舗装道路という文明的な環境が大前提。山岳やジャングルなどの自然界、さらに地震などでガレキの山という状態では、車輪は何の役にも立たない。そんな条件でも俊敏に動く動物や生物のメカニズムを工学的に解明して、人間社会に役立てることを目指している。
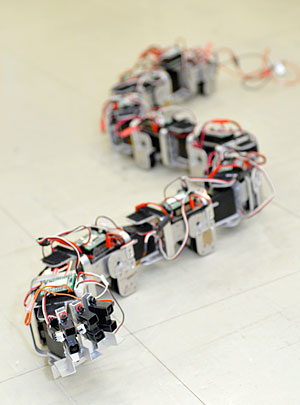
- ヘビ型ロボット
「シマヘビなどは人間が追いつかないほど早く、種類によっては砂漠などでも平気。狭い場所でも実に合理的にシンプルに動きます。神経系や知能も関係しており、自分の置かれた環境に即座に対応している。これを非常時の悪環境におけるレスキュー(救助)活動に応用することを考えてきました。ヘビの骨は150〜 400本くらいあることが解剖学的に分かっています。しかし、それがどのように連携して動きを制御しているのか。ロボットを実際に作って動きを分析・考察していますが、生物は素晴らしいメカニズムを備えていると、その都度驚かれされます」
ロボットとして再現する場合は、モーターの数や駆動装置を極力少なくすることも大きな課題となる。不合理な動きには余計なエネルギーが必要になり、故障やトラブルも増加するからだ。馬の柔らかい頭で考えた技術は、階段にぶつかった時の反作用を利用して次のステップに上がるシステムだ。
- クローラーロボット
「モーター一つだけで通常は車輪で走行。大きな穴があると車輪が引っ込み、ベルトが駆動して戦車のキャタピラーのように乗り越えるシステムも開発しています」
「1人の人間が一生をかけてもできることには限度がある」として若手研究者の育成にも熱心な馬だが、次の課題は水陸両用の移動方法の開発だという。「夢があって、常に探求心を刺激されています」
AERA 2010年12月20日発売号掲載 (朝日新聞出版)

ヘビ型ロボットムービー
このページに関するご意見・お問い合わせは 立命館大学広報課 Tel (075)813-8146 Fax (075) 813-8147 Mail koho-a@st.ritsumei.ac.jp
