
2011年3月7日更新
- 吉川恒夫
- 立命館大学情報理工学部教授
- 工学博士。1941年大阪府生まれ。1964年京都大学工学部精密工学科卒業。1969年同大学大学院工学研究科数理工学専攻博士課程単位取得満期退学。京都大学工学部助教授、アメリカNASAマーシャル宇宙センターNRC準研究員、京都大学工学部教授などを経て、2005年から立命館大学。研究テーマは知能ロボットおよびメカトロニクスなど。「趣味といえば、30年ほど続けてきた『ヘタなテニス』かな。今でも週に1回ペースでやっていますが、私の『ハンド』の運動知能レベルはまったく上がらないものの、気分はリフレッシュされますね」
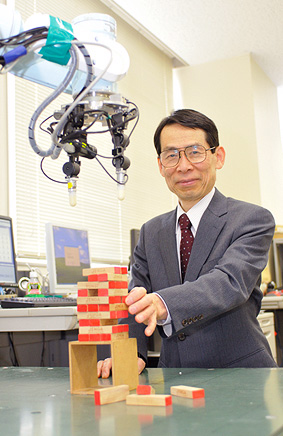
写真/吉川の持つ「ジェンガ」の上にある機械が人工知能を備えた「ロボットハンド」。指はフィギュアなどに用いられれる「人肌ゲル(超軟質ウレタン)」でできており、パーツをつまむ力まで調整することができる。

-
みんなが一点を見つめ、ハラハラ、ドキドキしている。長方形の木製パーツを積み上げたタワーから、交互に一本ずつ引き抜いて最上段に積み上げていく「ジェンガ」。ルールは簡単でも奥が深く、まさかロボットが相手をしてくれるとは思わなかった。
吉川恒夫が開発した「ロボットハンド」はただの「手」ではない。カメラを眼として備えており、タワーをゆっくりと周回しながら慎重に状況を判断。引き抜いても倒れないパーツを見極めたら、2本の指で木製パーツをはさみ取る。そのまま上方に移動し、全体のバランスを見て、位置を判断し、これを乗せていく。このロボットは繊細な作業をこなすだけではなく、視覚情報からゲーム運びを計画する知能を持つ。現在の知能レベルはまだ高くないが、将来は人間に勝てることを目標にしているという。
「二足歩行など様々なロボットが登場して話題になっていますが、人間と同じように頭で考えながら、いろんな作業を手を使ってこなせるロボットはまだ少ない。けれども、人間社会や家の中で本当に役立つヒト型ロボットを想定すると、その時々の状況にあわせて多様な動作をすることがきわめて重要な課題になってきます。たとえば皿を一枚一枚洗って、それを壊さないようにカゴに入れるといったことができて初めて、人間の生活に調和できるロボットといえるのではないでしょうか」
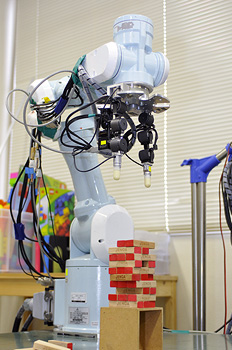
- ジェンガゲームロボット
吉川は1970年代半ばにNASA(アメリカ航空宇宙局)で人工衛星の姿勢制御を研究。「アポロ18号の打ち上げも現地で見ました」と語るが、この制御技術も「ロボットハンド」に深くつながっているのである。
「現実にはロボットが釣りのリールをグルグル回すことも簡単ではありません、まず指の運動自体を指示・制御する知能が必要。次に、運動を計画する、つまり作戦を立案する知能も不可欠です」
チェスでは世界一の名人に勝った人工知能が話題になったことがあるが「ジェンガ」は2次元ではなく3次元。しかも、木製パーツの摩擦やタワー全体のバランスまで考慮しなければならない。その上でロボット自身が戦略を立ててゲームを実行しているのだから、これは驚かざるを得ない。
「ヒューマノイドロボットが役に立つためには、知能をもっと発展させなければならない。そうなることで、将来『心』を持つロボットの誕生につながるのでは、と感じています」
未来を創る、その鍵はこの「ロボットハンド」が握っているのかもしれない。
AERA 2011年3月7日発売号掲載 (朝日新聞出版)

ジェンガゲームロボット
このページに関するご意見・お問い合わせは 立命館大学広報課 Tel (075)813-8146 Fax (075) 813-8147 Mail koho-a@st.ritsumei.ac.jp
