RESEARCH
(2002-2006)
*Movies are available at
www.ritsumei.ac.jp/se/~nokata/research.htm
Current Projects
|
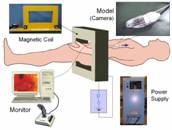
Magnetic drive of a
medical micro robot in abdominal cavity |
|
We have developed a new type of medical micro
robot keeping in the abdominal cavity driven by magnetic force. The motion of
the robot, move environment and the photography with the camera has been
investigated by in vivo experiment using simple prototype model. The friction
force between the abdominal wall and organs has been measured. We have
succeeded to drive the prototype model by simple magnetic field control. This
study could be applicable to the micro internal robot as one of the useful
medical tools. (This research was (partially) supported by the
Ministry of Education, Science, Sports and Culture, Grant-in-Aid for
Cooperation of Innovative Technology and Advanced Research in Evolution Area
project in the South Biwako Area, 2004 - 2006.) |
|
|


|
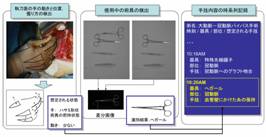
Recording System of
Surgical Operation by Image Processing |
|
This research aims at construction
of the system which identifies and records surgical operation by carrying out
the image processing of the video image. This paper presents the marking
patterns on a surgical glove and the calculation of a motion and position of
a hand, and the grip by image processing |
|
|

|
Micro miniature
forceps for catheter produced by Metal Injection Molding |
|
We have designed micro forceps
that’s compose of four parts, those are two holding parts (width 0.5mm), an exterior
pipe (diameter 1.0mm), and spring (line diameter 0.05mm). Then we have
developed the prototype of it by Metal Injection Molding technology. |
|
|


|
New magnetic
rotational drive by use of magnetic particles |
|
We
have proposed a driving principle and developed the verification models and
the generator of magnetic field. It became clear that our proposed driving
principle results from collision of the magnetic particles to the outer
cover, deformation of the whole form of magnetic particles and movement of
the center of gravity. We have succeeded to drive a rolling model by simple
magnetic field control. |
|
|


|
Development of
Biomimetic Actuator using Polymer Gel |
|
We have developed a Biomimetic
Actuator using Polymer Gel for wearable power assisted equipments. As a
result, We have realized Actin-Myosin Mechanism by use of friction drive. |
|
|




|
Pneumatic Micro Hand and
Miniaturized Parallel Link Robot for Micro Manipulation Robot System |
|
All PDMS micro
hand is fabricated with the developed manufacturing process and its related
working principle are discussed. The guide robot is developed which has several design specifications
such as multi degrees of freedom joint as a human, small size, highly
accurate directional control and water/ sterilization proof. Micro
Manipulation Robot System is developed by assembling the micro
finger with two or three degree of freedom, the guide
robot and VR interface device. The hybrid
motion and the manipulation of a single egg of fish and a
hair in
macro world is successfully realized. The micro hand
of this study could be applicable to the micro surgical treatment as one of
the useful medical tools. (A part of this work was
supported by the "Prototype Robot Projects (EXPO 2005 Aichi |
|
|


|
Development of Laparoscopic Surgical Forceps |
|
|
|
<< Movies here >> |

Past
Projects
|
Stroller with Support Mechanism to Negotiate Stairs |
|
|
|
<< Movies here >> |


|
High Performance Sensors
for Daily Watching Elderly People |
|
|
|
|


|
Man – Machine
Interface, Bio-measurement |
|
|
|
|


Researches (1994
- 2002)
Past Projects
(Ikuta Lab.,
|
Hyper Redundant Active Endoscope with Minimum Invasive
Surgery' |
|
Newly
advanced active endoscope named "Hyper Endoscope" with hyper
redundant degrees of freedom for future minimally invasive surgery in the
abdominal cavity is developed. The first prototype of Hyper Endoscope
equipped with several "Active Universal Joints" driven by miniature
cybernetic actuators is constructed and controlled successfully. In order to
achieve force sensational control of hyper endoscope, a micro master slave
control system with force feedback is verified by introducing ``dither"
technique. This system is very useful for remote surgery as well as
laparoscopic surgery. |
|
<< Movies here >> |


|
Minimum |
|
We
have already proposed new concept of active endoscope with hyper redundancy. This
medical tool named "Hyper Endoscope" for minimal invasive surgery
is driven by miniature cybernetic actuators. Dynamical model of the
cybernetic actuator taking into account of Piezoelectric effect is proposed
and detail performance is analyzed. Based on this result, new technique to minimize the number of lead
wires is proposed and verified experimentally. |
|
<< Movies here >> |


|
Risk Assessment of Design and Control for Human-Care
Robots |
|
The general
evaluation method of various kinds of safety strategies for rehabilitation
and human-care robots is first proposed in the world. The impact force and
impact stress are chosen as safety evaluation values to quantify safety. The
dangerous index and safety index are defined to make quantitative evaluation
of the effectiveness for each safety strategy. Moreover, this method enables
us to know the contribution of each safety strategy to the overall safety
performance of rehabilitation robot. As a result, design and control
optimization of the safety robot is discussed successfully. |
|
<< Movies here >> |


