

Biped humanoid robots
Development of humanoid robots
(Ritsumeikan Univ. 2010-)

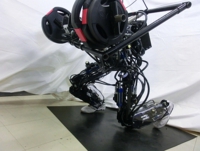

Hydraulic humanoid robot H1 and dual arm
Past achievement
(Waseda Univ. 1995-1997, ATR 2005-)
- Whole-body balancing (postural control)
- Contact force control
- Compliant full-body interaction
- Fast full-body motions
See this pagefor details.

Human-following walking (with Prof. Takanishiand Dr. Jinichi Yamaguchi)

Joint torque control implementation
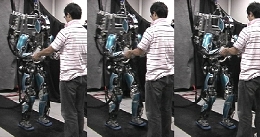
Human-assisted walking
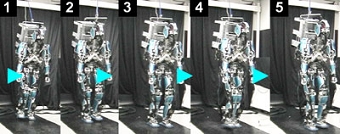
Autonomous biped walkingWhole-body compliant control and learning


Baseball batting

Compliant balancing on a moving seesaw
Quadruped robots for field applications


Torque-controlled hydraulic quadruped robots A1 and R1
Learning optimal walking/running control by symmetry and passivity
Learning optimal walking/running control by symmetry and passivity
(Tohoku Univ. 2002-2004, ATR 2005-, Nagoya Univ. 2005-, Gifu Univ. 2007-)
- Global gait generation by time-reversal symmetry and passivity
- Numerical analysis of symmetric orbits (with Prof. Tetsushi Ueta)
- Perturbation analysis of symmetric orbits (with Prof. Kazuyuki Yagasaki)
- Iterative learning control (with Prof. Kenji Fujimotoand Dr. Satoshi Satoh)
- Experiments of walking and running on a planar biped robot (with Prof. Takashi Emura)

Movie
Symmetric walking
Symmetric running
Simulation
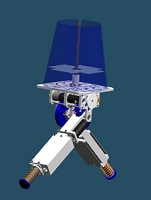
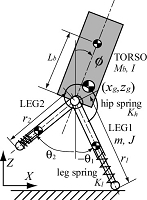
Biologically-inspired design and control of running robots
Biologically-inspired design and control of running robots
(Tokyo Institute of Technology 1998-2001, 2005-)
(Tohoku Univ. 2002-2004, Tokyo Institute of Technology 2005-)
See this pagefor details.
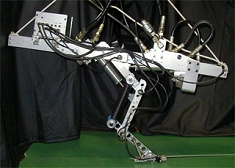 Kenken
Kenken
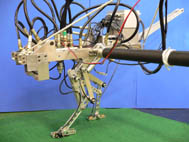 KenkenII
KenkenII
- Biomechanical design (bi-articular muscle)
- High-speed running (with the late Prof. Tsutomu Mita)
- Design and control of hydraulic actuators
- High-speed walking and running (with Prof. Takashi Emura)
- Optimal control of biped running (with Prof. Masaki Yamakita)
Movie
High speed hopping 2.0[m/s]
High-jump test (only at 1/3 of maximum power)
Swing test
Nonlinear control of (under-actuated) gynmastic robots
(Tokyo Institute of Technology 1999-2000, Tohoku Univ. 2002-2003)
- Optimal airbone posture control (with the late Prof. Tsutomu Mita)
- Nonlinear feedback control of contact forces and momenta
- High-speed handspring on a reald robot (with Prof. Takashi Emura)


Movie
Back-handspring
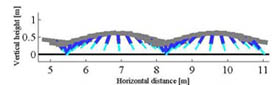
Analysis and control of passive running robots
(Tokyo Institute of Technology 1999-2001, Tohoku Univ. 2002-2004)

- Stabilization by time-reversal symmetry and passivity
- Numerical analysis of symmetric orbits (with Prof. Tetsushi Ueta)
- Iterative learning control (with Prof. Kenji Fujimoto and Dr. Satoshi Satoh)
Movie
High speed running at 5 m/s
Industrial Hydraulic Macninery
Hybrid Servo Drive
(Ritsumeikan Univ. 2011-)

Hydrauilc servo press (2013-)


Air-hydro servo press (2013-)
- Precise motion control
- Energy-efficient hydraulic circuits
- Pneumatic-hydraulic hybrid drive
- Digital servo controller
- Optimal control
Hydraulic Excavator
(Ritsumeikan Univ. 2011-)

- Force (pressure) control
- Autonomous control
- Semi-autonomous control with skill learning
- Hydraulic hybrid servo drive
Robots for education
Robots for education
Fishing robot (Tohoku Univ. 2002-2004)
Can press (2010)
