Mechanics and Synthesis of Soft Contact
Grant-in-Aid for Scientific Research on Innovation Areas (Science of Soft Robots) JP19H05337
This study investigate dynamics of soft contacts with design of materials and forms of soft robots.
In this research, the contact between soft robot body and the environment is referred to as soft contact. Investigating dynamics of soft contact during action of soft bodies, we clarify materials and forms for desirable soft contact. Especially, we focus on object manipulation by soft hands and and tactile sensing by soft sensors, to formulate the dynamics of soft contacts. We will design materials and forms of soft robots and soft sensors to realize their desired behavior. Furthermore, we will establish a method for creating materials and structures that realize the desired deformation characteristics. We aim to derive desirable properties through the analysis of soft contact and to design materials and structures that realize the desired properties.
(proposal in japanese)
Articles
- Analytical Modeling of a Soft Pneu-Net Actuator Subjected to Planar Tip Contact,
Analytical Modeling of a Soft Pneu-Net Actuator Subjected to Planar Tip Contact,
IEEE Transactions on Robotics, 10.1109/TRO.2022.3160048, Apr., 2022
- Takahiro Matsuno and Shinichi Hirai,
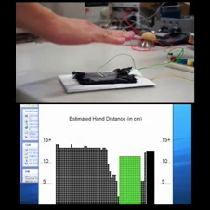
Analysis of Soft Contact in Force Sensing and Elastic Jumping,
Journal of Robotics and Mechatronics, Vol.34, No.2, Special Issue on Science of Soft Robots, pp.285-287, 10.20965/jrm.2022.p0285, Apr., 2022
- Takahiro Matsuno and Shinichi Hirai,
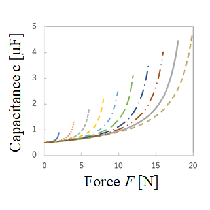
Reducing the Influence of the Contact Area on a Soft Capacitive Force Sensor,
IEEE Robotics and Automation Letters, Vol.6, Issue 3, pp.5824-5831, 10.1109/LRA.2021.3086429, June, 2021
Conference Papers
- Sachin, Zhongkui Wang, and Shinichi Hirai,
Analytical Modeling of a Soft Pneu-Net Actuator Based on Finite Strain Beam Theory,
2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2021), online, Sept. 27 - Oct. 1, 2021
- Takahiro Matsuno and Shinichi Hirai,
Reducing the Influence of the Contact Area on a Soft Capacitive Force Sensor,
2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2021), online, Sept. 27 - Oct. 1, 2021
- Takahiro Matsuno and Shinichi Hirai,
Optimization of the Initial Deformed Shape of a Circular Elastic Jumping Robot,
2020 IEEE Int. Conf. on Soft Robotics (RoboSoft 2020), online, May 15 - June 15, 2020
- Takahiro Matsuno, Tatsuro Katsuma, Zhongkui Wang, and Shinichi Hirai,
Novel Quick Return Mechanism and Dish Shape Deformable Body Structure for Circular Jumping Robot,
2020 IEEE Int. Conf. on Real-time Computing and Robotics (IEEE RCAR 2020), online, Sept. 28-29, 2020
- Shinichi Hirai and Takahiro Matsuno,
Morphological Design of Soft Capacitive Force Sensor,
30th International Symposium on Micro-Nano Mechatronics and Human Science (MHS 2019), pp.141-143, Toyoda Auditorium, Nagoya University, Nagoya, Japan, Dec. 1-4, 2019
Oral Presentations