|
|
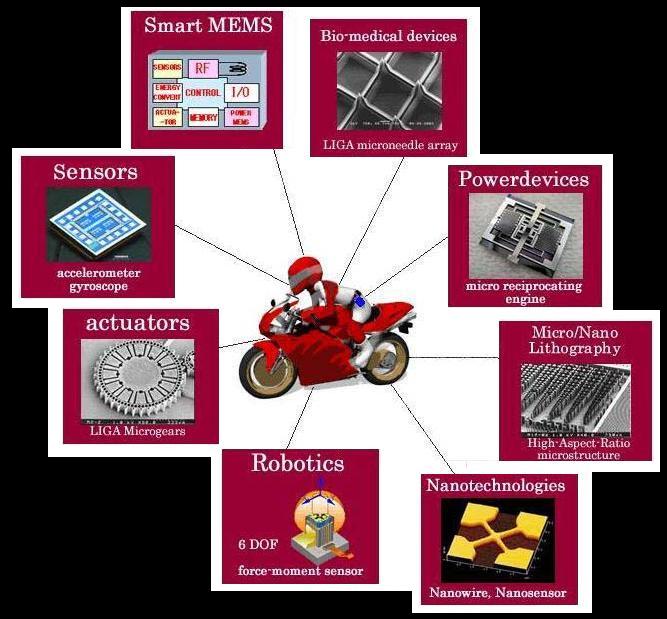
| 1980年代後半に、LSIと同じ半導体プロセス技術を用いてシリコン基板上にミクロンサイズの歯車やモーターを作り上げる革命的なマイクロシステム技術が登場しました。この技術を用いて作られるデバイスはMEMS(Micro-ElectroMechanical
Systems)と呼ばれ、世界各国の様々な大学や企業で研究開発が進められてきています。
現在の様々な産業の需要を満たすために、立命館大学ナノマシンシステム技術研究センター
(RINST: Research Inst. for Nanomachine System
Technology,旧マイクロシステム技術研究センター)
では、センターに設置されたマイクロプロセス施設やSRセンターのシンクロトロン放射光を活用して、MEMSの設計から製作、評価までを合わせて行っています。RIMSTの様々な活動の中で、マイクロ・ナノ集積デバイス研究室(杉山研究室)では、「21世紀COEプログラム」にも採択された「マイクロ・ナノサイエンス・集積化システム」の実現に向けた様々な研究を行っています。 当マイクロ・ナノ集積デバイス研究室ではMEMSの実現に向けて主に3つの研究を進めています。(1)MEMSの構成要素となるセンサの検出原理やアクチュエータの駆動原理、及びそれらの最適な設計を行うためのデバイス設計技術に関する研究。(2)半導体プロセス技術を応用して、最適設計を実現するためのマイクロマシニングプロセス技術に関する研究。(3)は機械システムと電気システムとを融合して、センサの信号処理やアクチュエータの駆動制御などを行うための、処理回路技術に関する研究です。私たちの研究室では、これらの技術の確立を行うことを研究の目的としています。 MEMSの最大の特徴として集積化されたデバイスであるという事が挙げられます。通常のLSIでは入・出力信号として電気量(単一)を扱うのに対し、MEMSでは電気のみならず物理、機械、光学、化学、生物など様々な情報を変換して入・出力信号として取り扱うことが可能です。私たちの研究室では産業界と連携して、センサ、アクチュエータ、及び製作技術のための多くの実用的な結果を生み出しています。
|
| Ni-Fe電気めっき技術 |
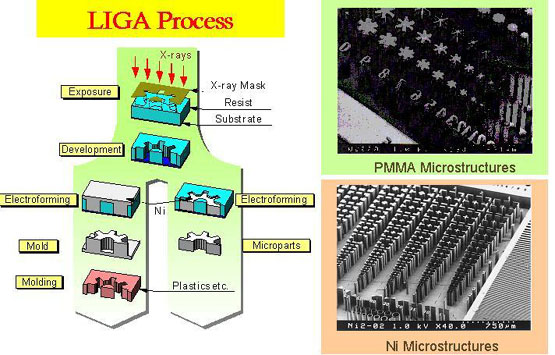
| LIGAプロ
セスは、X線リソグラフィと電鋳およびモールディングを組み合わせ、アスペクト比(加工幅に対する深さ(高さ)の比)の大きな形状を作る製法で、1980年代にドイツ・カールスルーエ原子核研究所で開発された技術です。各工程のドイツ語の頭文字をとってLIGA(Lithographie,Galvanoformung,Abformung)と名付けられています。厚さ100
μm以上のレジスト(感光性有機材料)に直進性の良いシンクロトロン放射(SR)光装置から発生するX線を用い、X線マスクを介してパターンを転写することにより、100μm以上の深さ(高さ)で横方向に任意の形状を持った超精密部品の製造が可能となります。 LIGAプロセスの基本工程を説明いたします。金属基板上に厚さ数百μmのレジスト層(ポリメチルメタクリレート(PMMA))を形成し、SR光X線を照射しマスク上のX線吸収体のパターンをレジスト層に転写します。レジスト層のX線露光部分は、高分子の連鎖が切れて分子量が減少し現像液に溶解します。また、未露光部分は変化せずにそのまま残ります。この結果、X線吸収体のパターンと同一形状のレジストの微細構造体が形成されるのです。さらにめっきによって、レジスト層の溶解した部分に金属を堆積させ金属構造体を形成させます(電鋳)。その後、未露光部分のレジスト層を除去しモールド(金型)を作製します。(この金属構造体をそのままマイクロマシン製品として使用することも可能です。)この金属構造体をモールド(金型)としてプラスチックを型成形することにより、マイクロマシン製品を大量生産することが可能です。このようにNi-Fe電気めっきキ技術は、微細構造体を大量生産するための金型作製技術として注目されています。
|
| マイクロニードル |
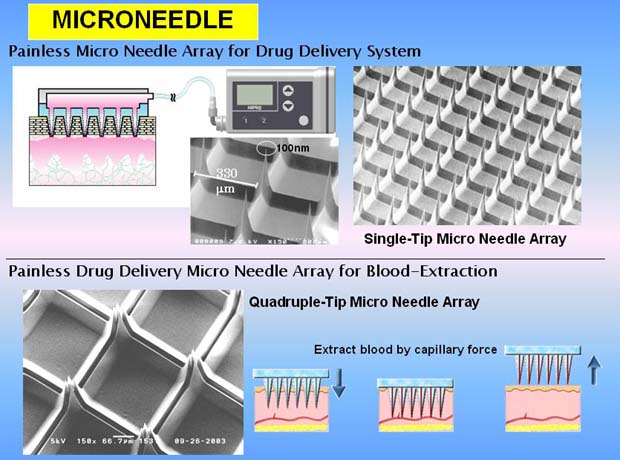
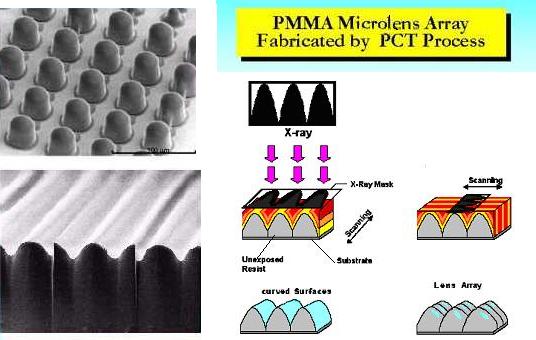
| マイクロニードルアレイは、LIGAプロセスに新規の3次元加工技術を組み合わせることによって作製可能となりました。この新規の作製技術である平面パターン断面転写法(PCT:Plain-pattern to
Cross-section Trsansfer) は、2次元の平面的なX線マスクから3次元の形状を有するPMMA構造体を作製する手法で、私たちの研究室で考案された手法です。(PCT法の工程に関しては後の「LIGA光学デバイス」の項を参照してください。)ニードル先端のサイズはマスクの角度を調節することで減少することが可能で、先端径は約100nmを実現しています。また、マスクパターンの形状を改良することで、マイクロニードルの形状を改良しております。このマイクロニードルはバイオや医療分野での応用を目指しており、
作製技術のみならず投薬システムと血液抽出システムの開発に関する研究も合わせて行っています。
マイクロニードルの穴を製作しなくても、血液抽出システムを可能にするような別手法も調査しています。 上図のような4本のピンタイプのマイクロニードルは、毛細管現象を利用することで、血液の採取が可能です。また、LIGAプロセスの、電気メッキ技術と融合し、モールドにより大量生産することも可能です。 |
| LIGAアクチュエータ |
| 本研究では、超伝導小型SR光源"AURORA"を用いたLIGAプロセス技術の研究開発を目的とし、その一環として静電マイクロアクチュエータの製作を行いました。これまでに、サーフェイスマイクロマシニングによって作製されたマイクロアクチュエータに関する多くの報告がありました。
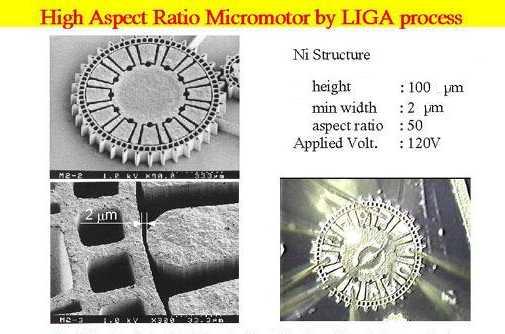
これらのマイクロアクチュエータの高さは、サーフェイスマイクロマシニングのプロセスの都合上、約1μm~10μmに制限されきました。しかしながら、LIGAプロセスでは100μm以上の高さをもつ高アスペクト比(高さ/幅)マイクロアクチュエータを作製することができます。
設計したマイクロアクチュエータの基本構造は、最下層から順にSi基板、SiO2、Ni導電層、Ni構造体となっています。Ni構造体はLIGAプロセスにより製作し、固定電極、可動電極、弾性梁、及びアンカーから構成されています。また、Ni構造体の高さは100μm、可動電極は下地のSiO2のエッチングにより基板から分離されています。最小線幅2μm、高さ100μm、最大アスペクト比50です。
高アスペクト比微細構造体にとって、側壁の表面粗さは重要な要素となります。電鋳によって得られたNi構造体の側壁粗さを原子間力顕微鏡(AFM)により測定を行いました。水平方向の粗さ、つまりマスク吸収体の側壁粗さは651nmでありました。また、垂直方向の平均粗さは23.1nmでありました。この荒さがX線リソグラフィーの最終仕上げ粗さとなります。またマイクロアクチュエータの駆動実験を行い、ワブルモーター、櫛歯電極型アクチュエータで駆動に成功しました。
作製したアクチュエータの応用としてはハードディスクのヘッドの高精度位置決め用アクチュエータなどが考えられています。 |
| LIGA光学デバイス |
| マイクロニードルアレイの作製と同様に、PCT法を用いることで自由曲面を有するPMMAマイクロレンズアレイの作製を行いました。通常のLIGAプロセスにおけるX線リソグラフィでは、レジストに対しマスクを固定して露光するのに対し、PCT法はレジストに対してマスクを相対駆動させる手法です。相対駆動させることにより、レジスト内部に吸収エネルギーの分布を与えて自由曲面を作製する手法です。作製したマイクロレンズの直径は5μmから1mmまで様々で、非球面形のレンズです。また、各レンズ間のピッチは50μmです。最大3mm角のチップサイズにマイクロレンズアレイを作製することができます。
|
| 圧電型デバイス |
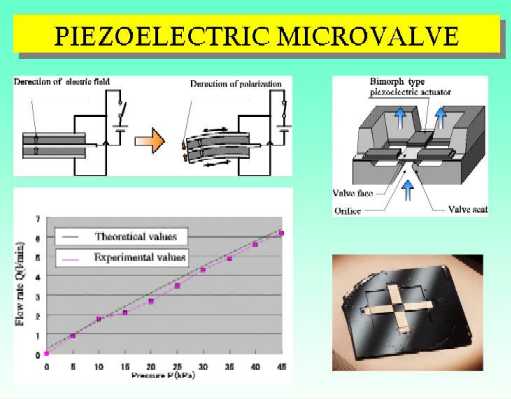
| 近年、様々な分野で小型化・高性能化が進んできております。機械システムの分野においては、小型化の限界を決める上で重要な、マイクロアクチュエータの開発も重要視されています。このような背景の中、本研究では小型計測器、なかでも空気流量制御を必要とする小型計測システム内部に使用されるマイクロバルブを開発することを目的としています。現在開発されているマイクロバルブに用いられているアクチュエータには様々なものがあります。バイメタル・形状記憶合金を用いたものでは、過熱・冷却によって弁体の開閉を行うため、応答速度が遅いという問題点があります。また、電磁式では構造が大きくなってしまうという問題点があります。これに対し圧電式は、応答が速く、小型化も容易であるという利点があります。そこでバイモルフ型圧電アクチュエータを用いたマイクロバルブの設計開発を行ってきました。圧電セラミックスは、電界により伸縮します。これを利用したものがバイモルフ型圧電アクチュエータです。分極方向を逆にした二枚の圧電セラミックスを張り合わせ、一方を長手方向に伸ばし、もう一方を縮めることにより屈曲させ、変位や力を得ることが出来ます。設計したバルブは、バルブに入った流体がオリフィスを通り、弁体とのギャップ部を経てビームの隙間から大気に放出される仕組みになっています。これまでに、実寸の5倍の大きさのマクロモデルを製作し、流量特性を調べました。非圧縮性、非粘性流体の定常流れとしてベルヌーイの式を適用した理論式を用いて計算すると、流量の実験値は理論値の98%となった。
|
| マイクロジャイロスコ ープ |
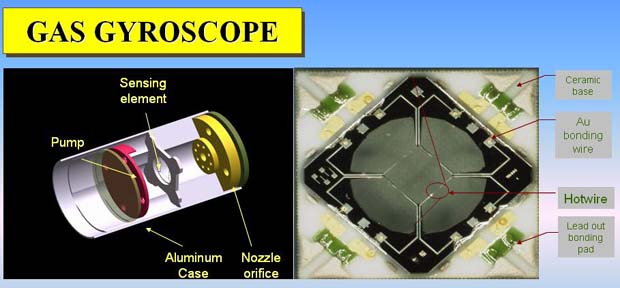
| TSi熱線の熱抵抗効果の原理を基に2軸のガスジャイロスコープの研究を行っています。現在研究しているガスジャイロスコープは体積変化を起こしません、したがって振動ジャイロスコープに通常起こるような特有の問題を取り除くことができます。センサの構成は圧電型のポンプ、マイクロ熱センサ、および直径14mm、長さ25mmのアルミニウムでパッケージされたケースからそれぞれ成りたっています。マイクロ熱センサは4本のシリコンサーミスタワイヤによって形成されています。ネオンは高い熱伝導率をもつ不活性ガスなので、センサケースの中の気体流として使用されます。センサは、従来のMEMSプロセスではSOI(silicon
on insulator) ウエハを用いて作製されてきました。ジャイロスコープはターンテーブルを用いて調整され、測定感度は0.15mV/deg/sec(検出部にタングステンを用いた同じデザインのものより62倍大きい)です
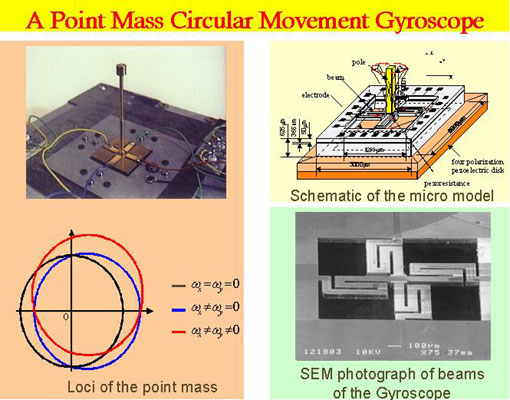
Tマイクロジャイロスコープの構造を上の図に示します。マイクロジャイロスコープは十字形に折り重ねられたSiの梁と、p型Si ピエゾ抵抗素子、および梁のの中央と両側の柱から成っています。十字形に折り重ねられたSiの梁は、幅50μm、厚さ50μmです。これらのピエゾ抵抗素子は最大圧縮力と引張応力がかかる箇所に形成されています。マイクロジャイロスコープは、X軸あるいはY軸回りの角速度が与えられた場合に発生するコリオリ力をビームの応力変化として検出し、各角速度を測定します。マイクロジャイロスコープは4個の電磁アクチュエータによって引き起こされる柱の回転運動を用います。そしてマイクロジャイロスコープに角速度が印加されると、コリオリ力がビームの応力を変化させます。 そして、ピエゾ抵抗素子を通してビームの圧力の変化を検出します。支柱の横とブリッジ(電橋)の両方の構成の組み合わせで加速の影響を取り除くことができます。
|
| レシプロエンジン |
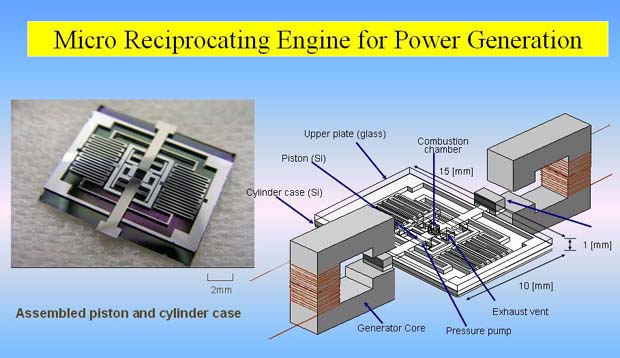
| マイクロレシプロエンジンは電力を発生させるために開発されました。
燃料として水素ガスを、構造体としてSiを採用し、圧縮比5、最高燃焼気温850K、そしてピストンの固有周波数610Hzの条件下の時、理論上の電力が約40mWとなります。マイクロエンジン作製のためのICP-RIEの加工方法は確立されました。また2つの項目に分類されます。(1)ピストンとシリンダケース、(2)ピストンとシリンダとガラスプレートのパッケージング方法。エンジンの動作は空気サイクルによって示されます。
|
| サーモパイル型熱電変換アレイ |
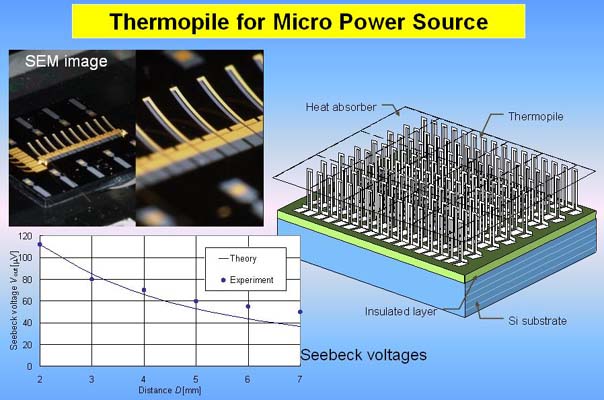
| メンブレンと自立構造を持っていないサーモパイル(熱電対列)は、理想的なより高い熱伝導を実現するために開発されました。この開発された構造には2つの利点があります:吸収された熱は熱電対列だけを通して温接点から冷接点への熱を移動するので、熱変換なしで温接点から冷接点を発生することができ、熱の吸収箇所はチップエリアよりも増やすことができます。結果として、温接点から冷接点の温度差は理想的な値に到達します。ここでは、マイクロパワージェネレータ(発電機)のためのpoly-SiとAuとのジャンクションから成る熱電対列の設計、製作方法、および特性について(特に最初の利点について)述べます
熱電対はn型poly-SiとAuで作製し、電気学会マイクロマシン集積チップ標準化協同研究委員会が主管となっているMICS(Micromachine Integrated Chip Service: 3層poly-Siレイヤー構造)を利用しました。
熱電対列のゼーベック電圧の実験結果(N
=10個の熱電対)を紹介します。放射線源として一般的な人間の皮膚温度(307K)を持っている黒体プレートを使用しました。結果として6.2mV以上のゼーベック電圧を得ました。その結果、実験結果と理論値はほぼ等しい結果を得ました。よって熱電対列のマイクロパワージェネレータへの応用への可能性は示されました。今後は、上側の熱の吸収装置がある熱電対列を製作する予定です。また、当研究室ではより高い熱伝導を可能にするサーモパイルを製作し、特性についても調査していく予定です。 |
| ナノマシニングセンサ |
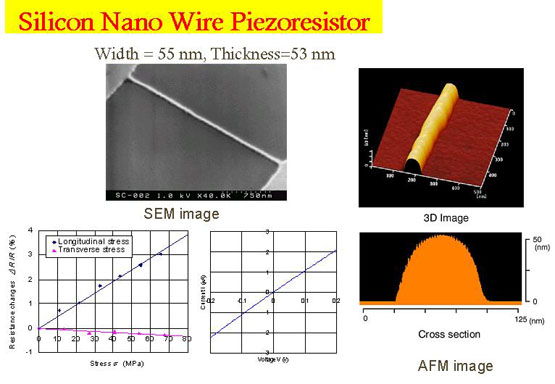
| 最先端半導体プロセス技術を応用することによりMEMSの分野においてマイクロオーダからナノオーダへの微細化が進んでおり、ナノオーダの半導体の機能や特性を応用した新規なMEMSの開発が期待されています。このような背景の中で、本研究ではポリシリコンナノワイヤーを製作し、機械量センサ用ピエゾ抵抗素子として十分に機能することを確かめるとともに微細化がピエゾ抵抗効果に及ぼす影響を検討しました。ポリシリコン(poly-Si)ナノワイヤピエゾ抵抗素子はEB(電子ビーム)直接描画によってパターニングを行い、RIEによってポリシリコンをドライエッチングして作製されました。また、電極には真空蒸着のアルミニウムを用いました。ポリシリコン(poly-Si)ナノワイヤピエゾ抵抗素子のピエゾ抵抗効果の特性は、機械量センサの検出素子として十分に機能することが確認できました。
|
| フォースモーメントセンサ |
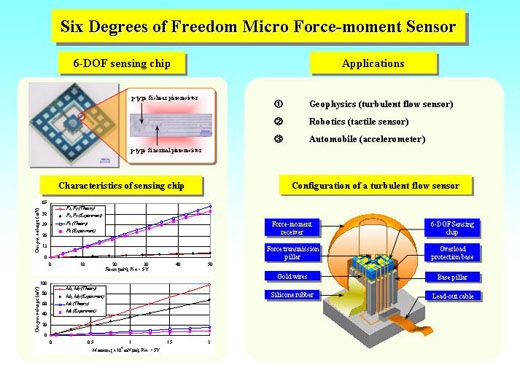
| シリコンにおける圧電効果(ピエゾ抵抗効果)を利用すしたマイクロ多軸フォースモーメントセンサの設計概念と理論調査について紹介します。フォースモーメントセンサは、乱流液体流動における境界粒子運動の、力量とモーメントを測定する研究での応用が期待されます。このセンサは、3つの独立した(x、y、zの3軸方向)力量とモーメントを検出するように設計されています。従来の4端末のピエゾ抵抗素子は、1つのセンサチップに融合されていました。
センサチップのモデルは、FEM解析によって構造体の応力を調査し、ビーム(梁)の寸法を決定しました。交差したビームのそれぞれのアームの最終的な寸法は500x120x40m3としました。 出力の特性と感度は徹底的に分析を行いました。ピエゾ抵抗素子の総数は、従来技術のピエゾ抵抗ベースの6-DOFマイクロフォースセンサのものより少なくなりました。
センサチップの交差したビームの上面にピエゾ抵抗素子を取り付けます。テスト粒子は、ポリエチレン製の直径8mmの粒子です。その重心は、水平力成分によって引き起こされるモーメントを最小にする交差ビームの中心と一致するでしょう。テスト粒子の運動における力とモーメント、あるいはその両方は、センサチップの中心に置かれたtransmission pillarを通してセンサチップに伝えられるでしょう。 |
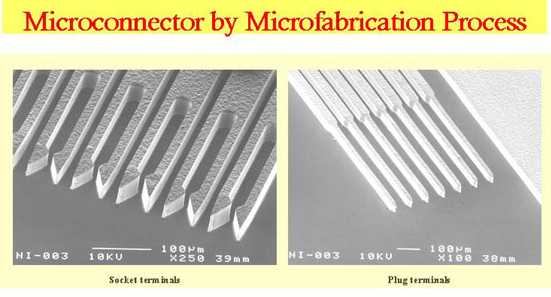
| マイクロコネクタ |
| 先端半導体IC技術の発展によりSOC(システム・オン・チップ)と呼ばれる高機能LSIが製造可能になり、それを用いた小型・軽量・高機能電子装置が開発されています。それに伴い装置内に使用される接続用コネクタも更なる小型化が要求されてきています。本研究では厚膜レジストを用いたUVフォトリソグラフィと微細電鋳技術を組み合わせることにより、ピッチ80μmのマイクロコネクタの製作を行いました。
従来品と比較した場合、既存のコネクタは、プレス加工・射出成形で製作しているためピッチ300μm以下の加工が困難です。そこで今回は、厚膜レジストを用いたUVフォトリソグラフィと微細電鋳技術を組み合わせることにより、ピッチ80μmのマイクロコネクタの製作を目標としました。 作製にはSiO2付きのSi基板を用います。その基板上に犠牲層およびコネクタ接点の電鋳用種層としてCr/Niを真空蒸着により形成します。次に、フォトリソグラフィにより犠牲層のパターニングを行い、Cuを電鋳し犠牲層を形成します。そして厚膜レジストを用いてコネクタ接点の電鋳用の型を形成します。Ni電鋳した後、厚膜レジスト、Cu犠牲層、Cr/Ni種層の順に除去を行います。最後にNiの防食を目的としたAuめっきを行います。Si基板上にピッチ80μm、厚さ50μmのフォークタイプのコネクタ端子を製作することができた。厚膜レジストで形成したNi電鋳用型のアスペクト比は最大5に達成し、テーパ率は2%でした。マイクロコネクタの強固な嵌合と正確な接続を得るために2段階のガイダンスを採用しました。また、製作したコネクタ端子単体を嵌合させ、接触抵抗を測定したところ約50mWの値を得ることができました。 |
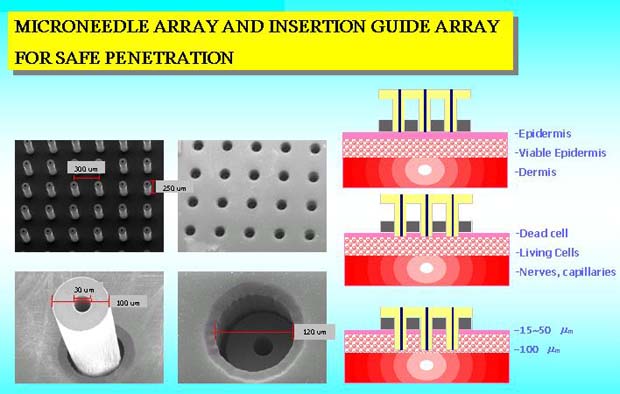
| バイオデバイス |
| A new method of
using silicon microneedle array in Bio-Medical
applications is introduced in this work. The hollow
microneedle array with the facilitation of an insertion
guide array have been designed and fabricated. The
needles can be pushed down through the second layer of
human skin with less-bending. The tip of microneedle will
be led by the insertion guide to pierce the skin
perpendicularly. The silicon bulk micromachining
technique using an inductively coupled plasma (ICP)
etcher has been employed to fabricate the microneedle
array and the insertion guide array. The array chips are
5x5 mm2 for both structures. The needle array chip
contains 100 microneedles with 100um and 30um of the
outer diameter and the hole diameter respectively. The
guide array chip is 100 um-thick and contains 100 guiding
holes with 120 um diameter. A buckling test of
microneedle gave the result that there was no microneedle
broken during the test via the guiding holes. Contrary,
there were several microneedles broken during the
penetration without the facilitation of the guide.
|
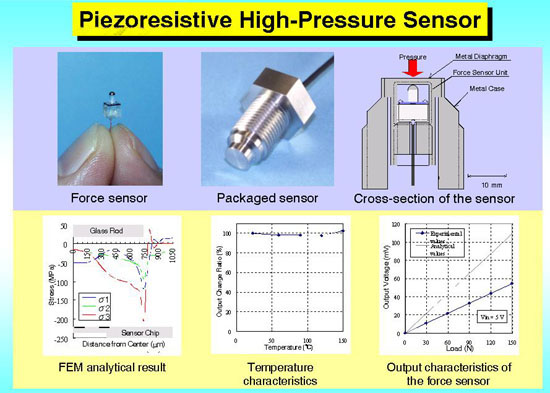
| マイクロ圧力センサ |
| ピエゾ抵抗型圧力センサは、圧力の高精度計測への応用が期待されています。私たちの研究室では、3軸方向の力の組み合わせを利用する高圧測定のためのSiのピエゾ抵抗型の圧力センサの開発を行いました。ピエゾ抵抗型圧力センサは、フォースセンサ、直径10mmのダイヤフラム構造のステンレス(SUS630)保護材、固定ねじ、ステンレス(SUS630)ケース、およびレジン・キャップで構成されました。圧力はガラス(SW-3)のトランスミッションロッドの力を通して、シリコンセンサチップの4つのピエゾ抵抗素子に適用される力によって伝えられます。ピエゾ抵抗素子に適用される力は、直径、ロッドの高さとヤング率、およびセンサチップのダイヤフラムの厚さに依存します。ピエゾ抵抗素子における大きな抵抗変化を得るために、3軸の圧力構成要素の最適条件の組み合わせは、これらのパラメータを変えることによって検討されました。プロトタイプの圧力センサの出力は150MPaの時50mV/5V以上でした。そして感度温度の特性は150℃から室温の範囲では
0.11%でした。
|
| Smart MEMS <Under Construction> |
|
| エキシマレーザー加工 <Under Construction> |
| ▲Top |
| レーザー3次元加工 <Under Construction> |
▲Top |
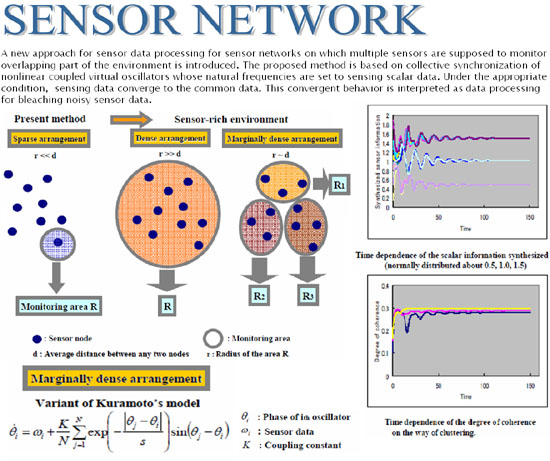
| Network sensor <Under Construction> |
|
| Piezoelectric mirror devices <Under Construction> |
▲Top |
| Electrostatic mirror devices <Under Construction> |
▲Top |
| Piezoelectric Actuator <Under Construction> |
▲Top |
| RF-MEMS <Under Construction> |