ソフトコンタクトの力学と創成
科学研究費補助金(新学術領域研究ソフトロボット)JP19H05337
本研究の目的は,ソフトコンタクトにおける力学の解明と,ソフトコンタクトを生み出すための材料と形態の設計である.
本研究では,ソフトロボットの身体と環境との接触を,ソフトコンタクトと称し,ソフトコンタクトの力学を解明するとともに,望ましいソフトコンタクトを生み出すための材料と形態を明らかにする.特に,ソフトハンドによる物体操作とソフト触覚センシングを対象として,ソフトコンタクトにおける力学を定式化するとともに,ソフトコンタクトにおける望ましい系の挙動を実現するために,ソフトフィンガーやソフトセンサを構成する材料の変形特性を設計することを試みる.さらに,望みの変形特性を実現する材料や構造を創生する手法を確立する.すなわち,本研究では,力学の定式化を通して望ましい特性を導き,望ましい特性を実現する材料や構造を設計することを目指す.
(提案書 全文)
論文
- Analytical Modeling of a Soft Pneu-Net Actuator Subjected to Planar Tip Contact,
Analytical Modeling of a Soft Pneu-Net Actuator Subjected to Planar Tip Contact,
IEEE Transactions on Robotics, 10.1109/TRO.2022.3160048, Apr., 2022
- Takahiro Matsuno and Shinichi Hirai,
Analysis of Soft Contact in Force Sensing and Elastic Jumping,
Journal of Robotics and Mechatronics, Vol.34, No.2, Special Issue on Science of Soft Robots, pp.285-287, 10.20965/jrm.2022.p0285, Apr., 2022
- 松野 孝博, 勝間 達郎, 平井 慎一,
円形ソフトロボットにおける弾性外殻の変形形状解析,
ばね論文集, No.66, pp.67-73, https://doi.org/10.5346/trbane.2021.67, Mar., 2021
- Takahiro Matsuno and Shinichi Hirai,
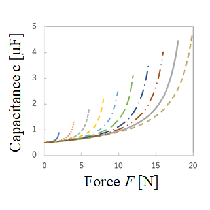
Reducing the Influence of the Contact Area on a Soft Capacitive Force Sensor,
IEEE Robotics and Automation Letters, Vol.6, Issue 3, pp.5824-5831, 10.1109/LRA.2021.3086429, June, 2021
国際会議
- Sachin, Zhongkui Wang, and Shinichi Hirai,
Analytical Modeling of a Soft Pneu-Net Actuator Based on Finite Strain Beam Theory,
2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2021), online, Sept. 27 - Oct. 1, 2021
- Takahiro Matsuno and Shinichi Hirai,
Reducing the Influence of the Contact Area on a Soft Capacitive Force Sensor,
2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2021), online, Sept. 27 - Oct. 1, 2021
- Takahiro Matsuno and Shinichi Hirai,
Optimization of the Initial Deformed Shape of a Circular Elastic Jumping Robot,
2020 IEEE Int. Conf. on Soft Robotics (RoboSoft 2020), online, May 15 - June 15, 2020
- Takahiro Matsuno, Tatsuro Katsuma, Zhongkui Wang, and Shinichi Hirai,
Novel Quick Return Mechanism and Dish Shape Deformable Body Structure for Circular Jumping Robot,
2020 IEEE Int. Conf. on Real-time Computing and Robotics (IEEE RCAR 2020), online, Sept. 28-29, 2020
- Shinichi Hirai and Takahiro Matsuno,
Morphological Design of Soft Capacitive Force Sensor,
30th International Symposium on Micro-Nano Mechatronics and Human Science (MHS 2019), pp.141-143, Toyoda Auditorium, Nagoya University, Nagoya, Japan, Dec. 1-4, 2019
口頭発表
- Takahiro Matsuno, Koki Arimoto, Tatsuro Katsuma, and Shinichi Hirai,
Binding Hand Mechanism for an Aerial Working Robot,
2021 IEEE Int. Conf. on Soft Robotics (RoboSoft 2021), online, Apr. 12-16, 2021
- 平井 慎一,
混合座標法に基づく線状ソフトロボットの動的モデリング,
ロボティクス・メカトロニクス講演会 2020, オンライン, May 27-30, 2020
- 松野 孝博, 鐘江 崚, 清水 敬太, 王 忠奎, 新竹 純, 平井 慎一,
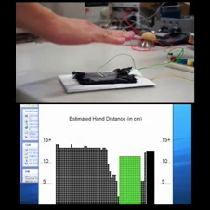
静電容量型ソフト歪みセンサを用いた薄型平面シェルグリッパの把持状態推定,
第38回日本ロボット学会学術講演会(RSJ2020), オンライン, Oct. 9-11, 2020
- 平井 慎一,
四元数を用いた線状ソフトロボットの三次元変形表現,
第38回日本ロボット学会学術講演会(RSJ2020), オンライン, Oct. 9-11, 2020
- 勝間 達郎, 松野 孝博, 平井 慎一,
円形ソフトロボットにおける高度跳躍のための変形機構と弾性外殻構造,
第38回日本ロボット学会学術講演会(RSJ2020), オンライン, Oct. 9-11, 2020
- 松野 孝博, 新山 龍馬, 平井 慎一,
拮抗駆動式2リンク跳躍ロボットの跳躍シミュレーション,
第38回日本ロボット学会学術講演会(RSJ2020), オンライン, Oct. 9-11, 2020
- 平井 慎一, 松野 孝博,
ソフト力覚センサの形態学的設計,
第37回日本ロボット学会学術講演会(RSJ2019), 東京都新宿区・早稲田大学早稲田キャンパス, Sept. 3-7, 2019
- 松野 孝博, 平井 慎一,
遺伝的アルゴリズムを用いた弾性外殻を有する円形ロボットの跳躍姿勢の最適化,
第37回日本ロボット学会学術講演会(RSJ2019), 東京都新宿区・早稲田大学早稲田キャンパス, Sept. 3-7, 2019