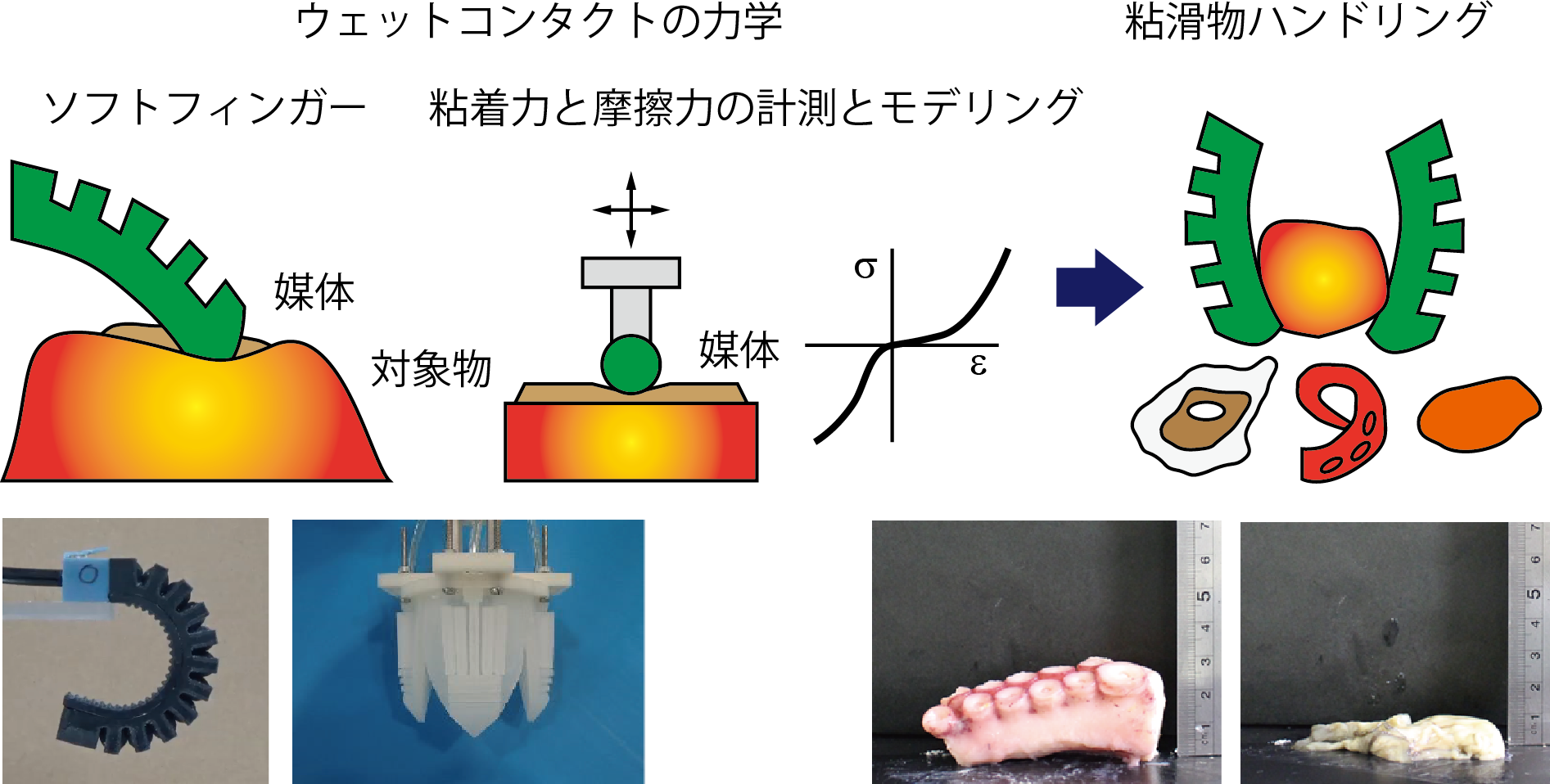
ウェットコンタクトの力学と粘滑物ハンドリングへの応用
科学研究費補助金(新学術領域研究ソフトロボット)21H00333
本研究の目的は,ウェットコンタクトの力学を解明するとともに,その成果を踏まえて粘滑物のハンドリングを実現することである.ソフトロボットが活動する環境は,ドライな表面を有する物体のみならず,ウェットな表面を有する物体を含む.たとえば,ソフトハンドによる海産物や水中生物の把持においては,水や粘液で覆われた表面との接触が生じる.ソフトロボットとウェットな表面との接触では,粘着力が生じ,摩擦が減少し滑りやすくなるなど,ドライな接触とは異なる現象が生じる.そこで,柔らかく表面がウェットな物体の接触をウェットコンタクトと称し,その力学を解明することを目指す.ソフトロボットとウェットな表面との接触は,ソフトロボットや対象物の変形,ウェットな表面における媒体の移動など,マクロな挙動に大きく影響される.そこで本研究では,様々な媒体や表面形状のウェットコンタクトにおいて,粘着力と摩擦力を計測・定式化する.さらに,その成果を基に,表面に粘着性や潤滑性を有する粘滑物のハンドリングを実現する手法を確立する.
論文
国際会議
- Takahiro Matsuno, Rikuya Miyagoshi, Keita Shimizu, Mana Ishihara, Shuya Watanabe, Jun Shintake, Kaspar Althoefer, and Shinichi Hirai,
Grasping State and Object Estimation of a Flat Shell Gripper by Strain and Proximity Measurement using a Single Capacitance-Based Sensor,
2022 IEEE Int. Conf. on Soft Robotics (RoboSoft 2022), University of Edinburgh (online), Apr. 4-8, 2022
口頭発表
- 石原 真奈, 松野 孝博, Kaspar Althoefer, 平井 慎一,
導電布を用いた近接・接触センサに基づく可変剛性リンクの圧力制御,
第39回日本ロボット学会学術講演会(RSJ2021), オンライン, Sept. 8-11, 2021
- 宮越 陸矢, 松野 孝博, 渡邉 修也, 新竹 純, 平井 慎一,
ソフトひずみセンサを用いたソフトグリッパの変形センシング,
第39回日本ロボット学会学術講演会(RSJ2021), オンライン, Sept. 8-11, 2021
- 三森 友貴, 平井 慎一,
非対称に膨張するマルチマテリアル柔軟膜の計算論的設計,
第39回日本ロボット学会学術講演会(RSJ2021), オンライン, Sept. 8-11, 2021
- 松野 孝博, 新山 龍馬, 平井 慎一,
拮抗駆動式2リンク跳躍ロボットにおける接触モデルと跳躍動作の関係の数値解析,
第39回日本ロボット学会学術講演会(RSJ2021), オンライン, Sept. 8-11, 2021