プラスティック材料を用いた極軽量ロボットアーム
Ultra-lightweight robot arm using plastic material
研究概要

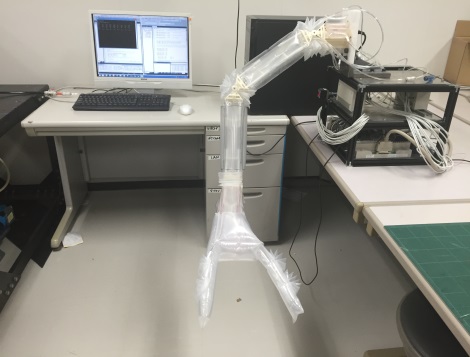
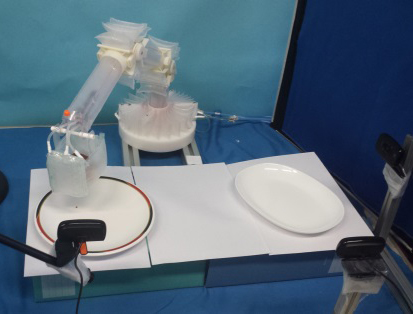
産業用ロボットに代表される従来の高重量なロボットアームに対して,極端に重量を低減したロボットは,新しい利用分野が期待されます. 例えば,極軽量であることによって,人に対する安全性を保証できる,飛行体等に搭載することが容易となる等の利点が考えられます. そこでこれまでに,ポリエチレン(PE)とポリブロピレン(PP)を用いて,平面内における位置と姿勢を制御できる平面3自由度の極軽量ロボットアームを開発しています.
特徴
・インフレータブル構造から,柔軟化,軽量化,大型化,コンパクト化など可能
・プラスティック材料から,電磁場への影響少なく,洗浄容易,低価格可能
応用分野
インフレータブル構造
・人やモノへ機械的接触作業用ロボット
・エンターテイメント用ロボット
・狭隘空間検査用ロングロボット
・宇宙ロボット
オールプラスチックの特徴利用
・MRI等の磁場環境作業
・食品等水洗い洗浄要求作業用ロボット
・低価格ロボット
関連資料
- 金,脇谷,堀池,西岡,河村,川村「極軽量インフレータブル構造ロボット用関節構造部の設計と実現」第31回日本ロボット学会学術講演会,3D2-04, 2013
- 金,西岡,川村「インフレータブル構造を持つ極軽量ロボットアームの開発」ロボティクス・メカトロニクス講演会2013,1P1-F05, 2013
- Hye-Jong KIM, Yuto TANAKA, Akihiro Kawamura, Sadao Kawamura and Yasutaka NISHIOKA, "Improvement of Position Accuracy for Inflatable Robotic Arm using Visual Feedback Control Method" Proc. of the IEEE International Conference on Advanced Intelligent Mechatronics(AIM2015), pp.767-772, Busan,Korea, July 7-11, 2015
- Hye-Jong KIM, Yuto TANAKA, Akihiro Kawamura, Sadao Kawamura and Yasutaka NISHIOKA, "Development of an Inflatable Robotic Arm System Controlled by a Joystick" Proc. of the 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN2015), pp.664-669, Kobe, Japan, Aug.31‐Sep.4, 2015
