高機能水中ハンドリング用小型グリッパロボット
Compact gripper robot for high-performance underwater handling
研究概要
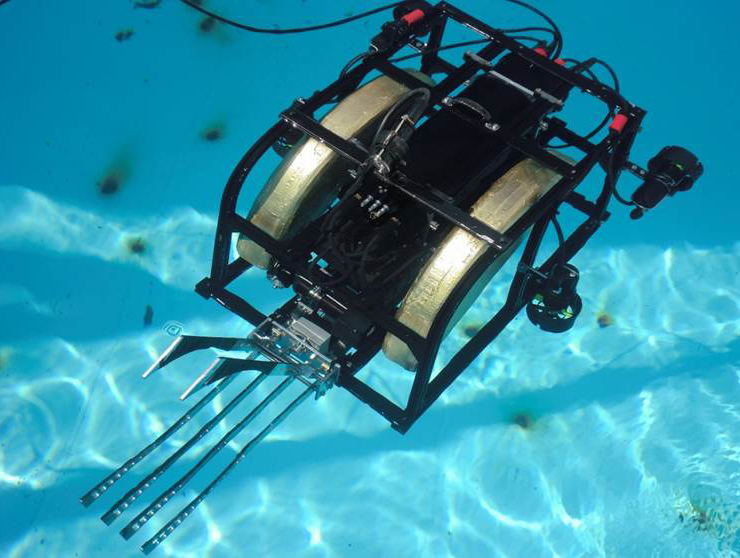
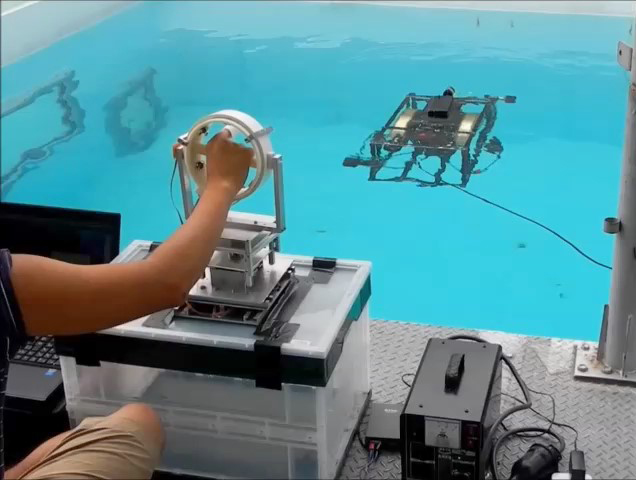
従来の小型水中ロボットは,船のメンテナンスや,海底などの環境を観察するために使用されることが多く,前後・左右・上下の直進移動が基本の動作となっています. しかし,直進運動だけの場合,水中にある物体を拾いたい,掴みたいと思っても水中の物体は様々な向き・角度で転がっているため,ロボットにグリッパが搭載されていてもうまく拾えないことがほとんどです. そこで,ロボット本体のピッチ角とグリッパのロール角の制御を可能とすることで任意の姿勢の対象物体の把持を実現しています. また,ピッチ角操作時には,ロボットの姿勢が変化するため,3次元空間での直感的な操縦が困難になります. そこで,任意のピッチ角を維持したまま直進移動を行う等の新しい操縦方法を実現するための,半自動化システムのソフトウェア開発も行っています.
特徴
・全長0.7[m],グリッパ長0.45[m],全重量31[kg]
・本体のピッチ角は水平状態から±90[deg]の操作が可能
・グリッパのロール角は水平状態から±180[deg]の操作が可能
・グリッパは直径5[cm]から50[cm]までの柱状物体の把持が可能
・片手で全自由度の操作可能な操縦装置
関連資料
- Kensei Ishizu, Haruki Nakayama, Norimitsu Sakagami, Mizuho Shibata, Sadao Kawamura, Shinji Matsuda and Atsushi Mitsui, “Preliminary Experiments of a Human-Portable Underwater Gripper robot for Dexterous Tasks” Proc. of the Oceans’14 MTS/IEEE TAIPEI, Taipei, Taiwan, April 7-10, 2014
- 石津,福島,上田,大出,坂上,柴田,川村,三井,松田,「浮心移動機構を用いた水中グリッパロボットの開発」ロボティクス・メカトロニクス講演会2012,2P1-H06,2012
- 石津,中山,福島,上田,坂上,柴田,川村,三井,松田,佐野,田子,「水中グリッパロボットの作業効率化を図る半自動化システムの開発」,第31回日本ロボット学会講演集,1O3-05,2013
- Sadao Kawamura, “Underwater Robot Development for Manipulation Task and their Uses in Biwa Lake” Proc. of the IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV2015), Girona, Spain, April 28-30, 2015
