ロボット本体とアームの協調運動による高機能水中ハンドリング
High-performance underwater handling by coordinated movement of a robot body and arms
研究概要
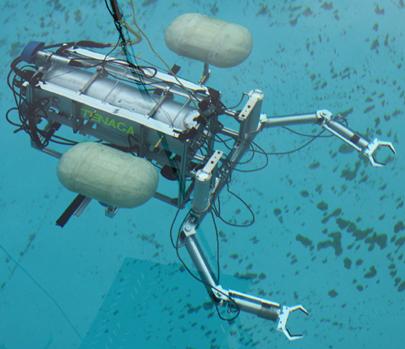
ロボットが水中で巧みなハンドリングを実現する為には, ロボットの自由度を増やす必要があります. しかし,自由度を増やした場合, 操縦者の負荷が増えるという問題があります. 従来の双腕型水中ロボットの研究においては, 完全なマスタスレーブ方式を用いており,操縦者の熟練を要していました. 本研究室ではセンサとステレオカメラを用いたフィードバックを利用することで,完全自動の多自由度水中ロボットシステムを開発しています. 開発しているロボットは多自由度単腕と左右独立式の浮心移動機構を有しています.
特徴
・左右独立式の浮心移動機構を搭載し,水中で静的にピッチ角とロール角の制御が可能
・5自由度の単腕を搭載
・本体を相腕の合計17自由度を操作可能な卓上操縦装置

関連資料
- 中山,福島,上田,坂上,柴田,川村,三井,松田「水中グリッパロボットの作業効率化を図る半自動化システムの開発」第31回日本ロボット学会学術講演会,1O3-05, 2013
- 上田,坂上,柴田,大西,村上,川村「浮心移動を利用した小型水中ロボットの姿勢角制御システムの解析」ロボティクス・メカトロニクス講演会2011,1A2-L15, 2011
- 川村,齋藤,橋詰,柴田,坂上「双腕搭載型小型水中ロボットの腕・本体同時操縦システムの評価」日本船舶海洋工学会論文集 第12号,2011S-OS5-5, pp.139-140, 2011
- Norimitsu Sakagami, Kouhei Ishimaru, Mizuho Shibata, Hiroyuki Onishi, Shigeo Murakami and Sadao Kawamura, “Development of an Underwater Robotic Inspection System using Mechanical Contact” Journal of Field Robotics, Vol.30, Issue 4, pp.624-640, 2013.
- Kensei Ishizu, Norimitsu Sakagami, Kohei Ishimaru, Mizuho Shibata, Hiroyuki Onishi, Shigeo Murakami and Sadao Kawamura,“ShipHull Inspection Using a Small Underwater Robot with a Mechanical Contact Mechanism” Proc. of theOceans’12 MTS/IEEE YEOSU, (120113-143), Yeosu, Korea, May 21-24, 2012
- N Sakagami, K Ibata, T Ikeda, M Shibata, T Ueda, K Ishimaru, H Onishi, S Murakami, S Kawamura,“Development of a Removable Multi-DOF Manipulator System for Man-portable Underwater Robots”Proc. of the 21st International Offshore and Polar Engineering Conference(ISOPE), pp.279-284, Maui, Hawaii, USA, June 19-24,2011
- Norimitsu Sakagami, Tomohiro Ueda, Mizuho Shibata, and Sadao Kawamura,“Pitch and Roll Control Using Independent Movable Floats for Small Underwater Robots”Proc. of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2011), pp.4756-4761, San Francisco, California, USA, September25-30, 2011
- Mizuho Shibata, Takaaki Saito, Norimitsu Sakagami and Sadao Kawamura, “Simultaneous Operation of Dual Arm and Body of Mobile Robots” Proc. of the 2010 IEEE International Conference on Robotics and Biomimetics, pp.149-154, Tianjin, China, December 14-18, 2010
- Norimitsu Sakagami, Mizuho Shibata, Sadao Kawamura, Toshifumi Inoue, Hiroyuki Onishi and Shigeo Murakami“An Attitude Control System for Underwater Vehicle-Manipulator Systems” Proc. of the 2010 IEEE International Conference on Robotics & Automation, pp.1761-1767, Anchorage, Alaska, USA, May 3-8, 2010
- Norimitsu Sakagami, Mizuho Shibata, Hideki Hashizume, Yuuta Hagiwara, Kouhei Ishimaru, Tomohiro Ueda, Takayuki Saito, Kazuhiro Fujita, Sadao Kawamura, Toshifumi Inoue, Hiroyuki Onishi and Shigeo Murakami“Development of a Human-Sized ROV with Dual-Arm” Proc. of the Oceans’10 IEEE Sydney, (100116-005), Sydney, Australia, May 24-27, 2010
