STORY #3
Underwater acoustic communication is the key to oceanic development


Hiroshi Kubo, Ph.D.
Professor, College of Science and Engineering
Aiming to communicate with
deployed marine robots
using sound waves
The underwater environment is said to be humanity’s final frontier. Information on the seabed, including the presence of hitherto unidentified organisms and undetected resources, as well as geological insights into submarine earthquakes, is extremely important for the survival of humanity. To facilitate information gathering therefor, the development of unmanned robots for marine exploration is currently underway around the world. The untapped resources lying dormant in the seabed are of particular interest. While Japan is said to be a resource-poor country, its territorial waters and exclusive economic zones together rank sixth in the world in terms of geographical area. The evolution of marine robotics holds immense potential for discovering these novel marine resources.
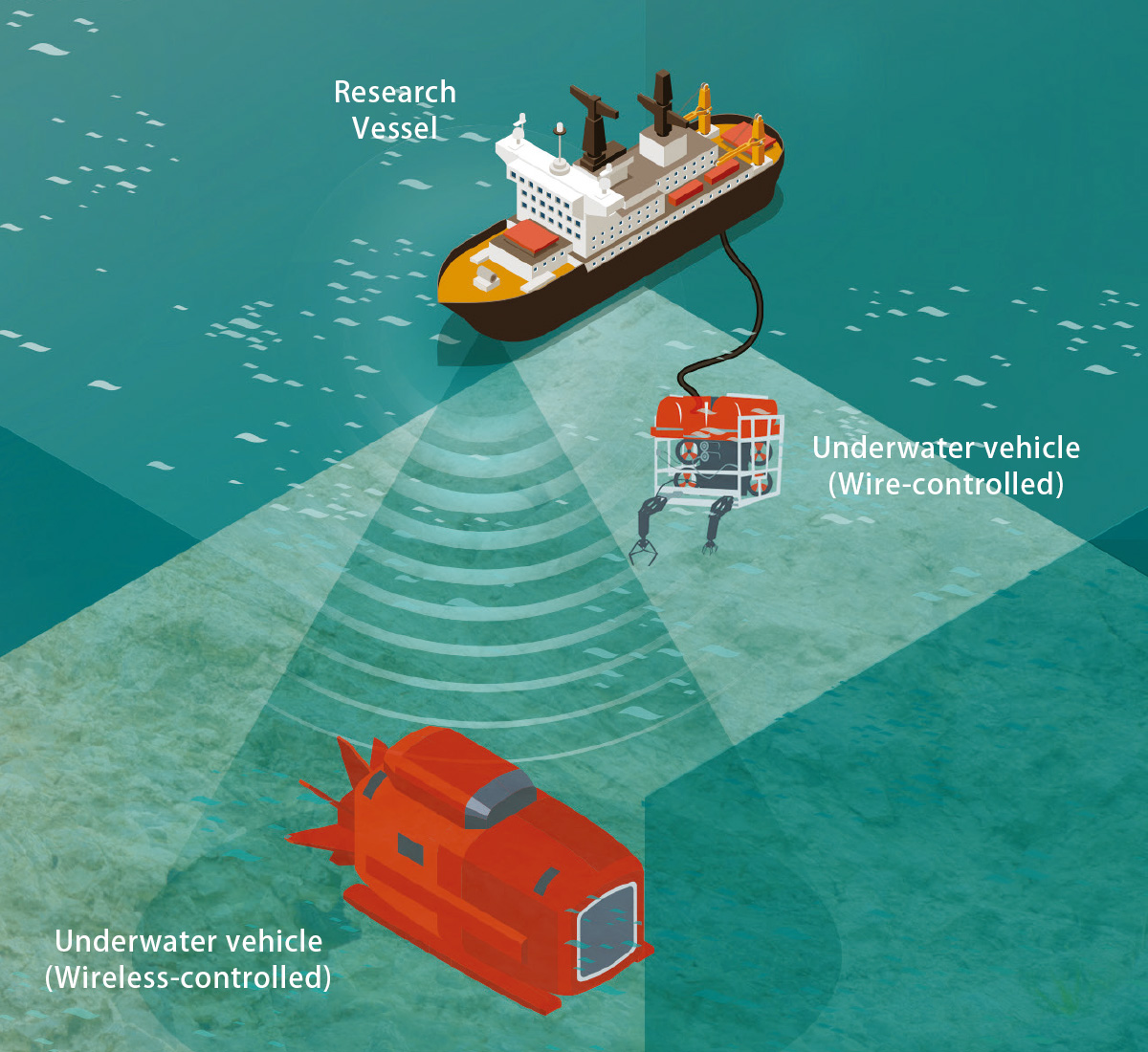
However, there are still several stumbling blocks to current oceanic exploration. One such stumbling block is communication. Radio frequency communication is commonly used on land, but underwater, radio waves are significantly attenuated, and communication even within a five-meter distance is profoundly difficult. While wired communication is possible over short distances, the use of communication cables for marine robotics moving through the sea comes with operational challenges. Acoustic communication offers tremendous potential for communication. The advantage of sound waves is that, unlike radio waves, they hardly attenuate even underwater.
Professor Hiroshi Kubo, College of Science and Engineering, who researches underwater acoustic communication, aims to communicate with underwater moving objects using sound waves. “The speed at which marine robots are expected to move is approximately three to five knots, which is about six to ten kilometers per hour. At first glance, it may not seem that fast, but it is extremely difficult to communicate acoustically with a moving object underwater,” says Kubo. The reason, he says, is the slow speed at which sound waves propagate underwater.
In water, sound waves travel at a speed of about 1,500 m/sec, which is an astonishing 1/200,000th the speed at which radio waves travel. “The slower the propagation speed, the more difficult the communication becomes due to the Doppler effect,” says Kubo. The Doppler effect is a phenomenon concerning sound emitted by moving objects; the wavelength of the sound gets shorter, and the frequency higher, as we get closer to the source of the sound; conversely, the wavelength of the sound gets longer and its frequency decreases as our distance from that sound source increases. This is why the siren of an ambulance sounds differently as it approaches and moves away from us. Since sound waves travel much slower underwater than radio waves, even if the moving object is moving slowly, the frequency shift becomes more prominent, resulting in a larger Doppler effect (known as a Doppler shift). The greater delay in the reflection time of the waves is also a major problem, as is the Doppler shift. Resolving these problems is essential for underwater acoustic communications in a mobile environment.”
For many years, Kubo has been involved with industries dealing with the practical application of high-speed mobile and satellite communication technologies. After gaining experience handling land- and air-based communication technologies, he transferred to Ritsumeikan University to take on the remaining challenges concerning the actualization and practical application of underwater communication technologies.
He began by building an experimental system for underwater acoustic communication. Then, he moved on to full-scale underwater experiments. In 2015, he conducted a short-range communication experiment in shallow waters on Lake Biwa. Although it was in a quiescent environment with a distance of approximately five meters, he confirmed that errorless communication was possible. Nonetheless, he was confronted with a challenge that made it necessary to fundamentally rethink the communication methods that he had been examining up to that point. “Initially, we wanted to realize underwater wireless communication by resolving the phasing issue, which made mobile radio communication difficult. Yet the simulation based on the expected propagation path model and the experimental results were not matching up,” says Kubo. In radio communications, the phenomenon of phasing occurs when multiple reflected radio waves at various locations interfere with one another, causing the level of radio waves to fluctuate. In the case of underwater acoustic communication, however, the impact of the Doppler shift and the increase in delay times, as mentioned before, becomes much greater than that in phasing environments. Once he realized this and changed the propagation path model to be specific to underwater acoustic communication, a path to a potential solution opened up.
“Once again, we focused on the characteristics of the underwater acoustic communication environment and reconsidered the transmission path model, assuming that the transmission path model was comprised of multiple propagation paths with Doppler shifts,” Kubo says. In conventional wireless communication, communication is possible by measuring the channel (the propagation environment of sound waves) and estimating the transmitted data based on the measured values. However, there is a slight difference in the time between the channel measurement and data determination; so, if the channel changes significantly, the estimated performance will be reduced. Therefore, Kubo devised a transmission path prediction technology called “joint detection” that simultaneously performs transmission path estimation and data determination on changing channels. His technology prepares multiple data candidates and corresponding channel candidates in advance and selects the optimal candidate from among those channels. As a result, channel measurement and data determination can be performed simultaneously. Kubo says this method would even allow for handling more rapid channel variations.
The newly developed communication method was also verified through experiments. First, after confirming that it can handle the Doppler shift in an experimental tank test, Kubo and his team went on to conduct a successful communication test from a ship moored in the ocean to a depth of approximately 30 meters. They also succeeded in an experiment in a shallow water environment in the ocean. In November 2018, they conducted an offshore communication experiment from a ship moored offshore to a pier in Izu, Japan, which covered a distance of approximately 370 meters, which resulted in successful long-distance communication, verifying its sound performance.
Kubo and his team are currently improving their simulator for simulating oceanic mobile environments. “The theory of wireless communication methods for marine-based mobile environments is now nearly established. Following the confirmations of our simulations, in the near future, we wish to conduct in-ocean experiments in Izu to ensure successful underwater acoustic communication in the mobile environments,” he says enthusiastically. It seems that achieving their goal may not be a distant reality now.
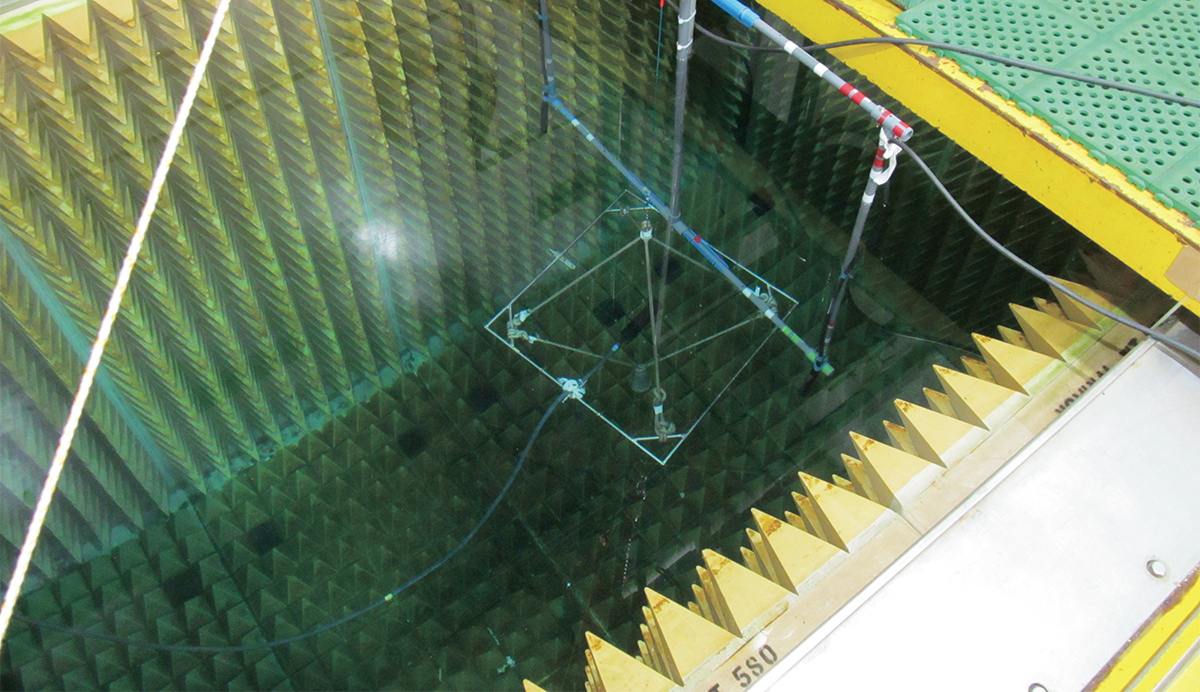

: Experimental tank. : Operation of Doppler generator. Since it is difficult to reproduce an underwater acoustic communication transfer environment, it is effective to evaluate the performance of a simulated transfer environment using an experimental tank. However, since the experimental tank has limitations in setting conditions analogous to mobile environments, reproducing a wide range of mobile environment conditions through simulations would be ideal. As shown in the figure below, the developed simulator can reproduce the Doppler environment of the experimental tank. This simulator is currently being improved to simulate oceanic mobile environments.

- Hiroshi Kubo, Ph.D.
- Professor, College of Science and Engineering
- Specialty: Wireless Communication Technologies
- Research Themes: Mobile Communications for High-Speed Transportation Vehicles; Underwater Acoustic Communications; Terrestrial Acoustic Communications; Propagation Environment Analysis; Applications of Radio Signal Processing Technologies