
2011年1月24日更新
- 平井慎一
- 立命館大学理工学部ロボティクス学科教授

- 工学博士。1963年生まれ。1990年京都大学大学院工学研究科数理工学博士課程単位取得満期退学。1996年から立命館大学。日本機械学会ロボティクスメカトロニクス部門業績賞など受賞歴多数。研究テーマは移動跳躍ロボット、生体組織モデリングなど。趣味は、水泳、山登り、折り紙。休日はもっぱら子どもの相手をして過ごすという子煩悩な一面も。「将来、家族と軟体ロボットを連れて山登りをする日が楽しみです」
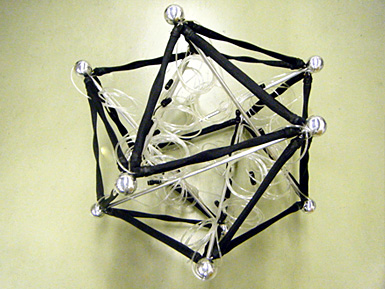
写真/左下は空気圧で伸縮する人工筋肉を利用してゴトンゴトンと転がる「移動跳躍ソフトロボット」の最新型。平井が手にしているのは、このロボットの構造「テンセグリティ」の模型。  集積機械知能研究室
集積機械知能研究室



-
ロボットといえばガンダムなどの硬い金属の塊が二本の足でガシガシ歩く姿を想像する。だが、この「移動跳躍ソフトロボット」はゆっくりと軟体動物のように動く。いわば「軟体ロボット」だ。歩行せず、「転がり」と「跳躍」によって移動するロボットを生み出したのが平井慎一だ。
「クルマは車輪で動きますが、ガレキが散乱した道ではまったく通用しません。二本足のロボットもツマづいたりして転倒したらアウト」。では、たとえば災害時にいったいどんなロボットなら仕事ができるのか。「どんな悪路や不整地でも自由に動き回れる能力、それがこの『軟体ロボット』には備わっています」
試行錯誤を重ねてたどりついた最新形体は、一見したところ「ロボット」のイメージとは程遠い。その理由は、特異な構造にある。
- 移動跳躍ソフトロボット
建築空間を作るときに利用される「テンセグリティ」という構造をご存知だろうか。棒と糸の対からなる球体である。棒同士は接触せず、糸にかかる張力によって形を保っている。弾力があり、軽く弾ませることもできる。テンセグリティによって作られた構造体は中心がどこにもなく、張力と圧縮力がバランスを保持している。そのため、支えがなくても姿勢を維持することが可能だ。
「軟体ロボット」はこの構造を基礎としている。アルミの金属パイプと伸縮する黒いゴムを互い違いに組み合わせた。黒い部分は人工筋肉であり、ビニールパイプから空気が送り込まれると収縮し、アルミ部分を引っ張ることによってゆっくり転がり始める。この仕組みを使えば、坂も登れ、「ポンッ」という音には驚かされるが、ジャンプもできる。カタチは奇妙だが、地震などでガレキの山になった被災地や山岳地帯でも自由自在に移動できる。
「でこぼこ道を移動する手段としてはクローラーなどのベルト駆動も考えられますが、それでは重くて下になる物にダメージを与えてしまう。このロボットならば、素材はアルミとゴムだけで非常に軽量なので、その心配はありません」
ロボットの中心部にカメラを搭載すれば、人間や機械が入れない現場でも、内部の状況を確認できる。この構造と動きなら、悪条件の地表を持つ惑星探査にも応用できそうだ。それを宇宙人が見たら、と考えるだけでも愉快ではないか。
「これまでに4センチ~60センチまでの大きさで100体以上は作っています。物体が自ら変形して動くのは世界のどこにもないアイデア。そのせいかICRA(ロボティクスとオートメーションに関する国際会議)で発表したら、海外の研究者たちがYou win!(負けたよ!)と。これは、嬉しかったですね」
AERA 2011年1月24日発売号掲載 (朝日新聞出版)

移動跳躍ソフトロボット
このページに関するご意見・お問い合わせは 立命館大学広報課 Tel (075)813-8146 Fax (075) 813-8147 Mail koho-a@st.ritsumei.ac.jp
