Robot Wine Pouring Challenge
Each team will drive a UR robot manipulator to pour beads (substitutes for wine) into a glass fixed on the table. Beads are contained in multiple containers, such as plastic bottles and cups.
- team
- Each team is composed of 2 or 3 students. The budget for each team should be within 30,000 yen.
- UR manipulator
- One UR manipulator is commonly used for all teams. We will have a lecture how to use the manipulator.
- gripper
- Each team fabricates a gripper to be attached to the tip of the manipulator. The size of the gripper should be within W200 x D200 x H200 initially. Any driving method is available for the gripper. Manual operation is permitted only for opening/closing the gripper. It is also allowed to use the I/O port of the UR manipulator for the operation of the gripper. The ports available to each team will be assigned later.
- attaching a gripper to the manipulator
- We provide CAD drawing of the hand interface of the UR robot manipulator to attach the fabricated gripper to the UR manipulator.
- competition area
- Competition area consists of start area, goal glass, and stock area. A scale and a tray are installed under the goal glass. The start area is on the right side of the UR manipulator, and the goal glass is on the left side.
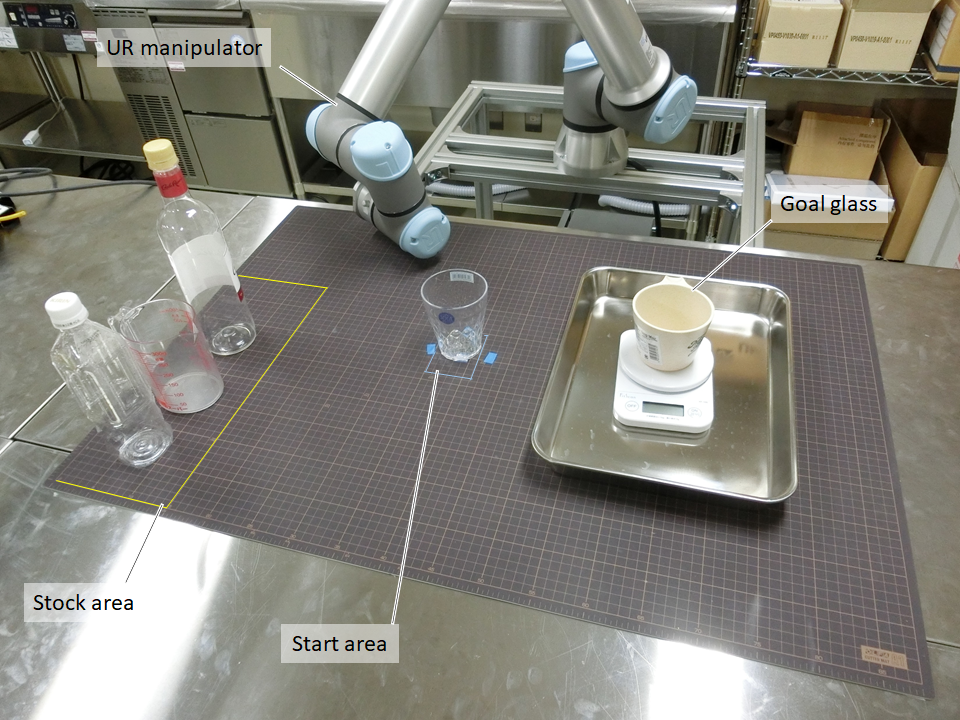 |
| competition area |
- containers
- The stock area has four containers. Each container is pre-filled with 100g beads (6mm in diameter). The goal is to pour all these beads into the goal glass.
 |
 |
 |
 |
| 81 x 54 x H95 |
59 x 59 x H220 |
79 x 90 x H110 |
D68 x H280 |
| four containers |
 |
| goal glass(90 x 67 x H70) |
- Each team will attach the fabricated gripper to the UR manipulator and load the robot motion program, then guide the UR manipulator to the initial position.
- Each team will select one of the containers and place that container in the start area. This operation is performed by the team.
- After placing the selected container in the start area, each team will run the UR manipulator program. The robot grasps the container and pours the beads in the goal glass. Manual operation of the gripper is allowed.
- After pouring the beads, the team will return the container to the start area. Containers must be standing in the start area without falling.
- The referee will record the weight of the beads poured into the goal glass. After recording, the goal glass beads are removed.
- The team will return the container to the stock area. Then, the team will select one of the remaining containers and place it in the start area.
- The team will perform the same pouring operation for the newly placed container. The competition ends when this process has been completed for all four containers or when the team gives up the competition. The referee will record the btained points and operation time for the team.
- The above is one set. Each team performs three sets. After three sets, the best score will be given to the team.
| 2020/3/19 |
robot contest meeting(basic operation check) |
| 2020/3/5 |
robot contest meeting(gripper conceptual design) |
| 2020/2/25 |
robot contest meeting with lecture on UR manipulator |