Heads: 平井 慎一
Contact: 佐竹 祐紀
Date: 2024 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
Associated lab/group:
|
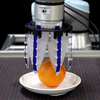
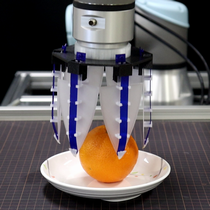
接触駆動ハンド
Heads: 平井 慎一 Date: 2024 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
床面との接触によりアクチュエータなしで開閉するロボットハンドに関する研究を進める.
| 担当 |
| 名前 | 学年 | 学位 |
| 研究発表 |
| 参考資料 |
|
| 関連サイト |