![]()

本研究室では、一貫してタスクダイレクティッドロボティクスの研究を行ってきています。
このための基盤技術であるロボットアームの動特性同定法とモデルベースド制御に基づく軌道制御はほぼ完了の域に達し、
力・インピーダンス制御に関しては軸トルクセンサの新規開発等により更なる性能向上のための研究を続行します。
タスク理解研究はこれまでにシミュレーションで検証してきた2,3の作業について実験検証に移行するとともに新たな作業に挑戦します。また、もっと幅広い作業を行えるように視覚装置の開発を行います。
実験装置はロボット作業実習で用いたJS-2と同様のシステム、高速6軸力センサ、交流モータ、直流モータ等を用います。
ぜひ研究室に遊びにきてください。
新しい発見があると思います。
![]()
![]()
環境認識知能の開発

● 動物体の追従・把持のための画像処理アルゴリズムとビジュアルフィードバック制御
● CCDカメラを用いた動物体の位置・姿勢検出
((資料(ビジョン班) ⇒ ))
![]() 環境の動特性に関する研究
環境の動特性に関する研究
産業用ロボットが行う作業には、手先が環境と接する作業が数多く存在します。その例として、突き当て作業や押し付け習い作業などがあげられます。このような作業をロボットに実行させる場合には、ロボットの手先に緩衝材がよく用いられます。また、このような作業をロボットに実行させるには力・インピーダンス制御が有効であると考えられています。しかし、環境及び、ロボット手先緩衝材の動的な性質は一般的に分かっていないので、安定かつ高精度にロボットを制御することが困難です。この問題点の解決方法として環境及び、ロボット手先緩衝材の動的な性質を測定し、それぞれをモデル化したものを制御に組み込むことが挙げられます。そのため知能ロボット研究室では環境及び、ロボット手先緩衝材の動的な性質の測定を目的とした専用装置の開発を行いました。これにより動的な性質を周波数領域において正確に測定できるようになりました。今後の課題として、単純なマス、ダンパ、スプリング系では表すことが困難なシリコンなどの粘弾性体の動的な性質のモデル化を行うこと、人間の指など生体計測を行うことそして、生体計測を行うのに便利なように持ち運びが可能な測定器の開発を行うことが挙げられます。
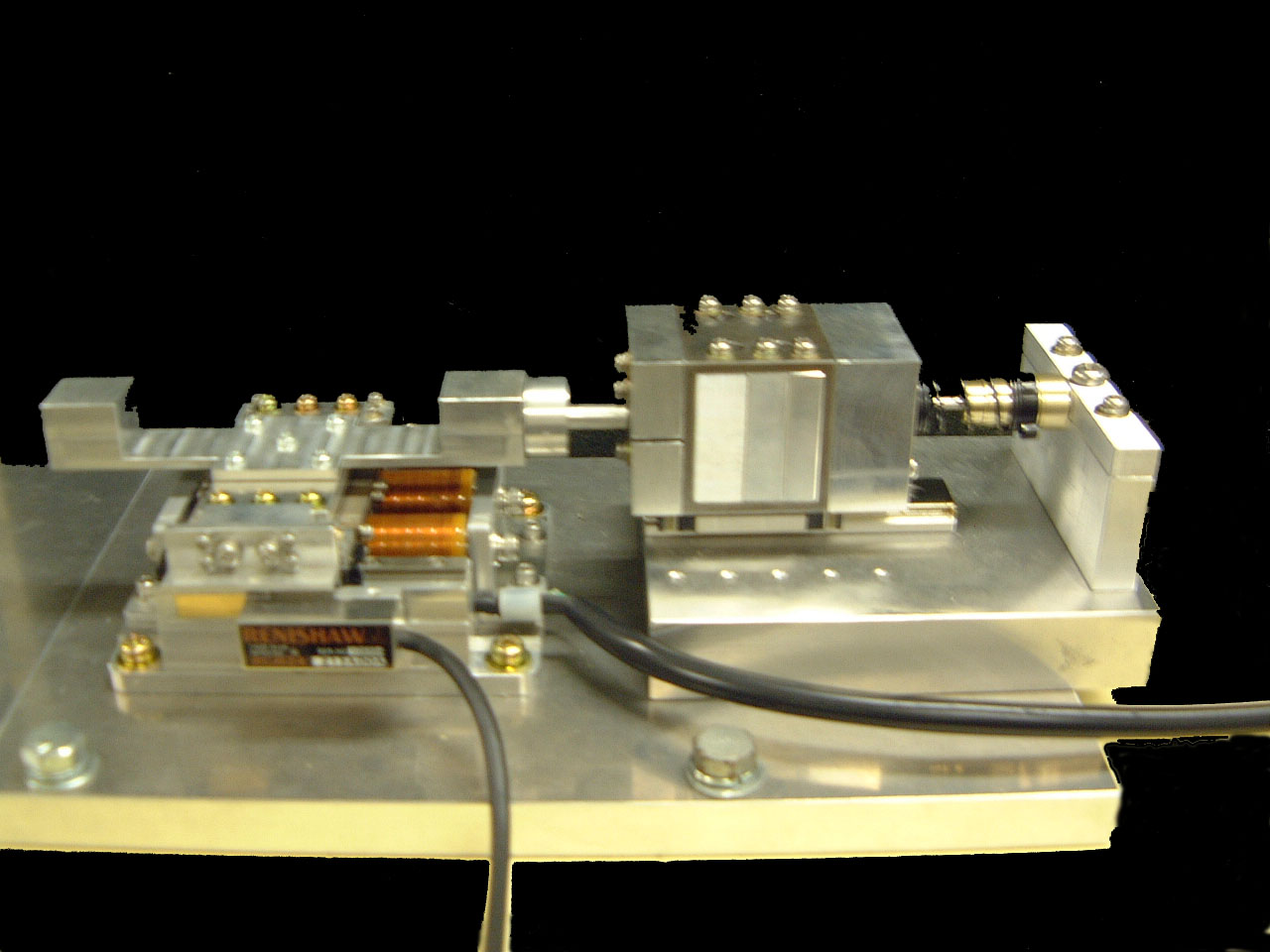
● 環境の動的な性質測定器の開発
![]() 運動・力・インピーダンス制御の高度化
運動・力・インピーダンス制御の高度化
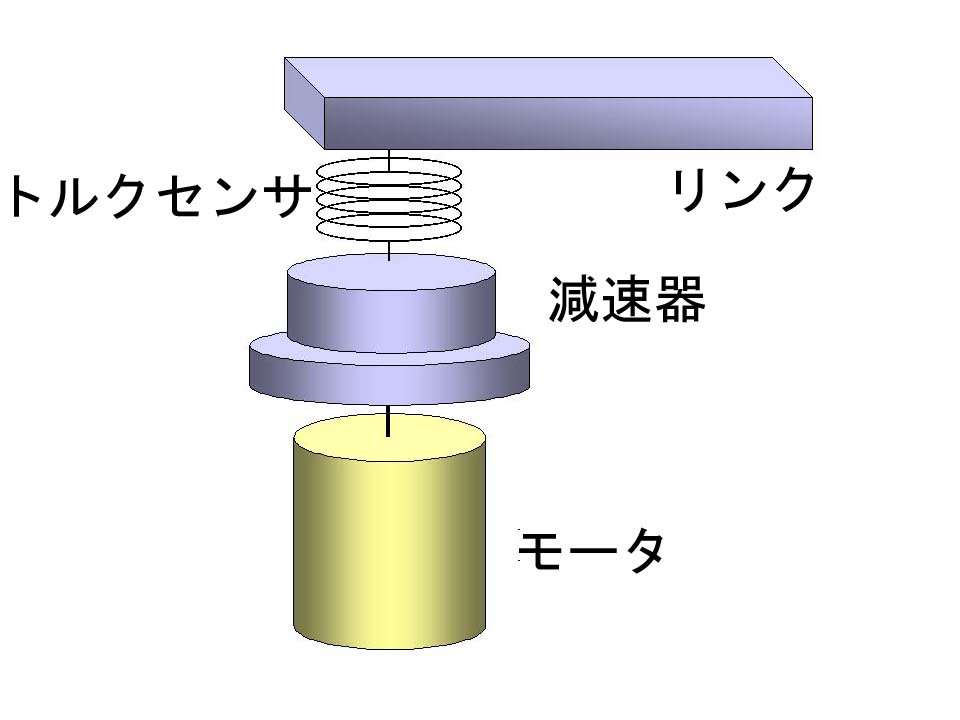
この研究は、ロボットを安定かつ高精度に制御することを目的として、概念図(右図)に示すような、
減速器とリンクの間の関節軸にかかっているトルクを計測するセンサを開発しようというものです。
それは、今までのロボットはトルクセンサがなく、リンクへの出力トルクを把握できずに制御していましたが、
そのトルク値が導かれることでより正確な制御の指令をモータへ与えることができるからです。
ここで、なぜリンクへの出力トルクを把握するのかといいますと、
モータからの出力が減速器を介してリンクへ伝えられるとき、減速器の中で摩擦が発生するなど、
モータへの指令値のみでは実際に出力しているトルクが計算できない実情があるからです。
現在、軸トルクセンサの開発にあたって、センサの構造として軸のひずみを検知してトルクを導くことを前提としているため、
センサ軸の振動をできるだけ早く抑える方法を確立しようと取り組んでいます。

● 軸トルクセンサの開発と軸トルク制御
![]() 高速コントローラの開発
高速コントローラの開発
● PCベースドサーボコントローラの開発
![]() タスク理解の研究
タスク理解の研究


● 曲面に対する倣い作業のタスク理解
● 人体等柔軟物体の倣い作業
● 新規作業
![]() パワーアシストキャリーカートの開発
パワーアシストキャリーカートの開発
パワーアシスト・キャリーカート班では2004年4月から始まった「階段昇降可能なパワーアシスト・キャリーカートの開発」を行っています。ここでいうキャリーカートとは荷物を載せて手で引っ張って使うカートを対象にしています。現存するキャリーカートでは重い荷物を運ぶ時、特に坂道や階段昇降時では人間が大きな力を出し続けなければなりません。人間が小さな力で操作できるように、キャリーカートにモーターと力センサを取り付けてアシストして解決しようとしています。
・想定
自宅から店の往復
平地・坂道走行と階段昇降
積載重量10kg程度
・現状
モータ
傾斜角、摩擦、重量、走行速度
⇒100W以上
消費電力小さい、パワー密度が高い
⇒ Maxon社製 70W×2個(400g×2個)
バッテリー
パワー密度、エネルギー密度大きい
⇒リイウムイオン電池 15V Ah
![]() その他新規研究課題
その他新規研究課題
自発的、積極的な意志随時募集