<Abstract>
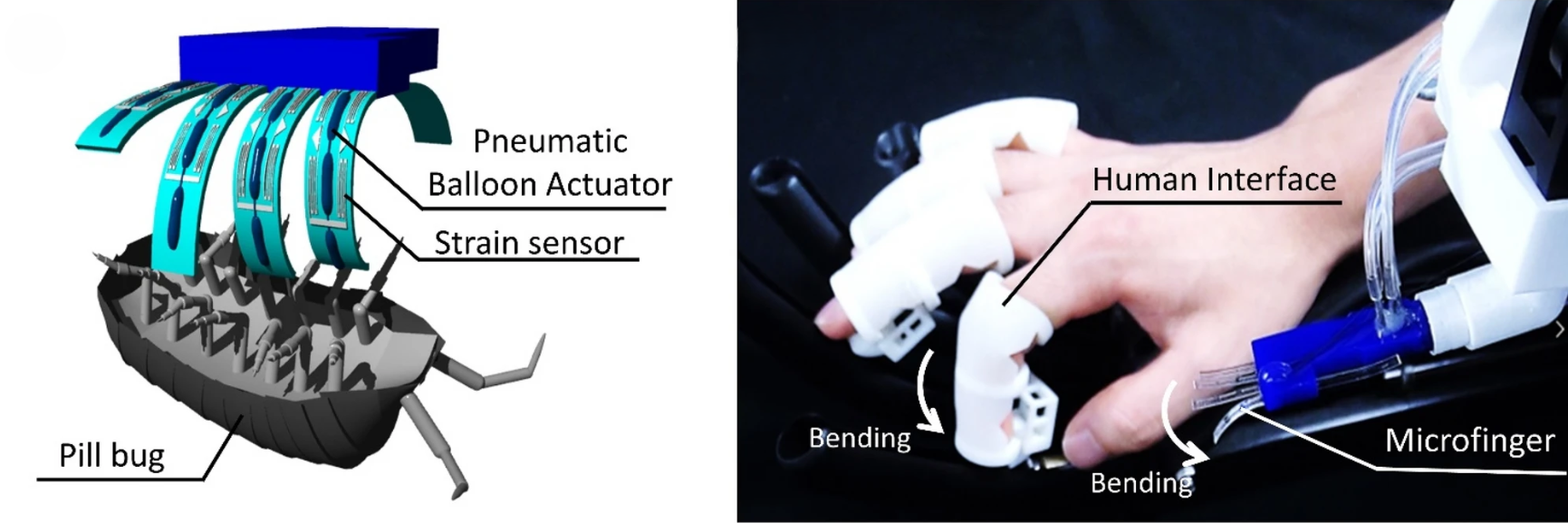
We are conducting research on microfingers based on Pneumatic Balloon Actuator(PBA)
developed in our laboratory. By integrating sensors into microfingers,
which are small devices, it is possible to analyze small objects.
Active tactile sensing of small insect force by a soft micro finger toward microfinger-insect interactions
<Abstract>
We are developing intravital therapeutic suction cup devices for the purpose
of efficiently delivering drugs to the trunk of a living body. We aim to
achieve long-term fixation in living tissues using suction cups and needles.
<Link>
Effect of anchor structure for improvement of shear fixation force by drug delivery device using suction force
<Abstract>
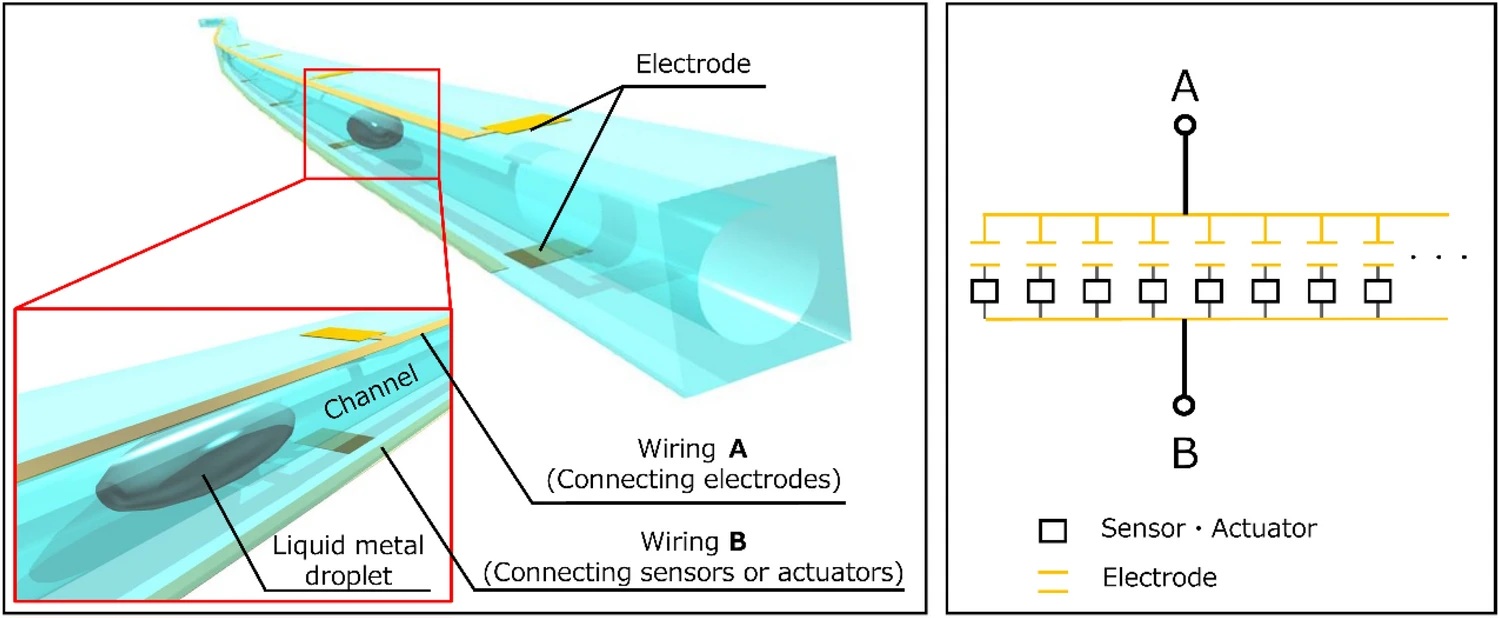
We are conducting research on switching devices that utilize flow structures
to improve the performance of long devices such as catheters and endoscopes.
Through this research, we expect to integrate sensors and actuators while
maintaining the long shape of the device.
Liquid metal droplet shuttling in a microchanel toward a single line multiplexer with multiple sensors
<Abstract>
We areconducting research on devices that enable manipulation of cultured
cellular tissue. We are working on the application of flexible and biocompatible
materials to the biological field.
Implementation of soft microfingers for a hMSC aggregate manipulation system
<Abstract>
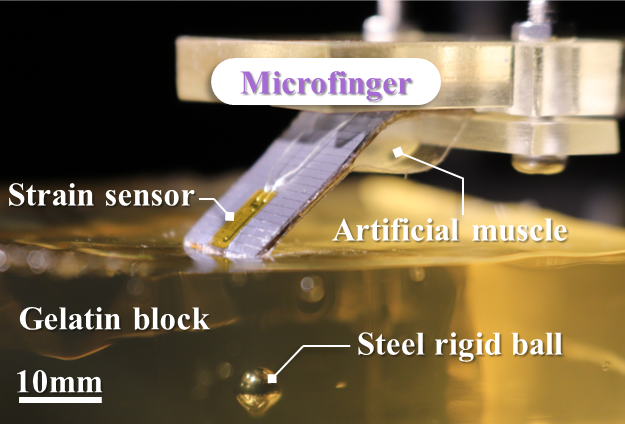
We are conducting research on surgical support devices that collect tactile
information to assist the surgeon in specular surgery. Using a finger-shaped
robot with integrated tactile sensors, we are working on estimating the
location of tumors inside organs.
Directional touch sensing for stiffness singularity search in an object using micro finger with tactile sensor