マイクロハンド
<研究概要>
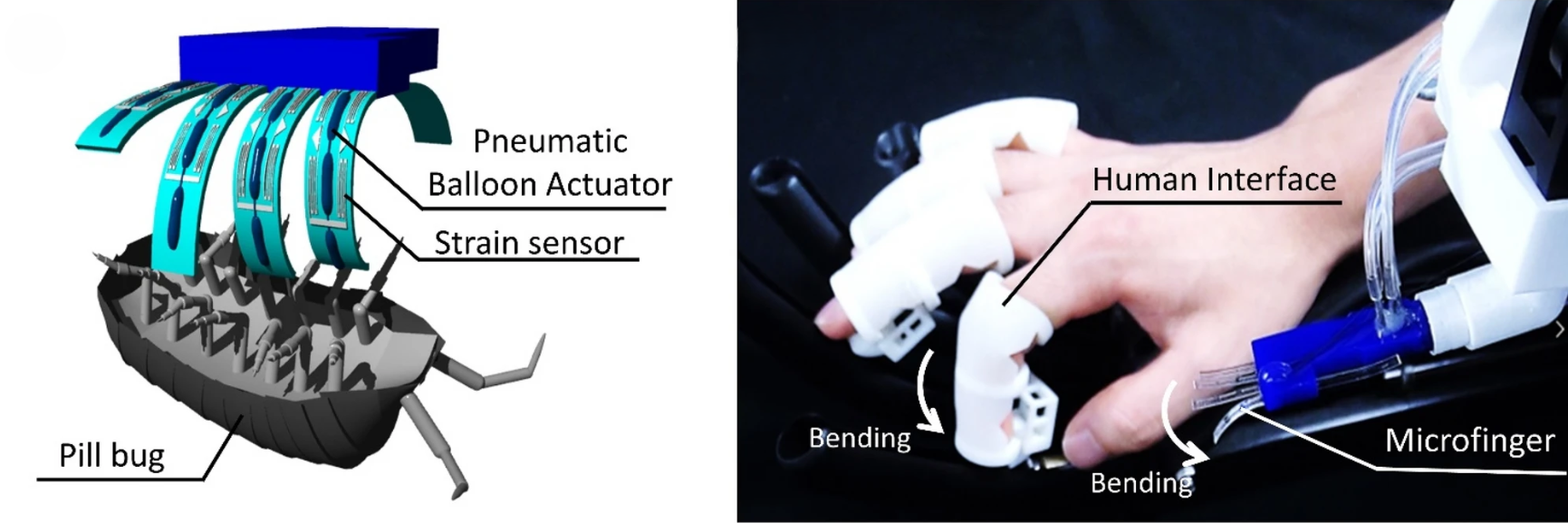
本研究室で開発された圧力駆動バルーンアクチュエータを応用したマイクロフィンガーの研究を行っています。小型デバイスであるマイクロフィンガーにセンサを集積することによって小さな対象の分析が可能になります。
昆虫とマイクロフィンガーの相互作用に向けた柔軟なマイクロフィンガーによる能動的な小さな昆虫の力の触覚センシング
(Active tactile sensing of small insect force by a soft micro finger toward
microfinger-insect interactions)
液体金属液滴を使用したスイッチングデバイス
指向性触診マイクロフィンガー
細胞操作マイクロフィンガー
体内治療用吸盤デバイス
<研究概要>
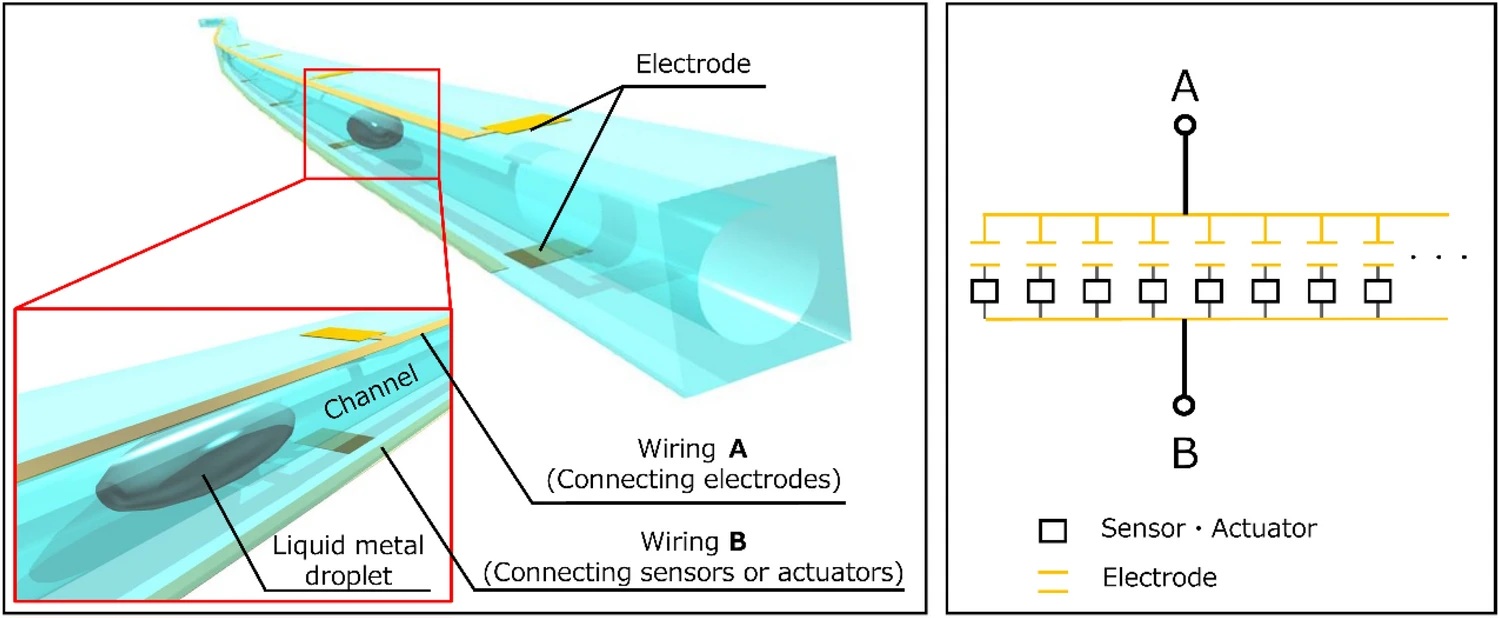
カテーテルや内視鏡のような長尺デバイスの高性能化のため流路構造を利用したスイッチングデバイスについての研究を行っています。この研究により、デバイスの長尺形状を保持した状態でのセンサやアクチュエータの集積が期待できます。
マイクロ流路内を移動する液体金属液滴による電極間スイッチングとそのマルチセンサ対応マルチプレクサ応用
(Liquid metal droplet shuttling in a microchanel toward a single line multiplexer
with multiple sensors)
変動圧力下の液体金属液滴の往復運動と圧力センサ信号の同時検出
(Simultaneous detection of the shuttling motion of liquid metal droplets
in channels under alternating pressure and capacitive sensor signals)
<研究概要>
生体内の幹部へ効率的に薬物を供給することを目的とした体内治療用吸盤デバイスの開発を行っています。吸盤やニードルを用いて生体組織への長期固定の実現を目指しています。
<論文リンク>
吸盤固定型ドラッグデリバリーシステムのせん断方向固定力向上のためのアンカー構造効果
(Effect of anchor structure for improvement of shear fixation force by
drug delivery device using suction force)
<研究概要>
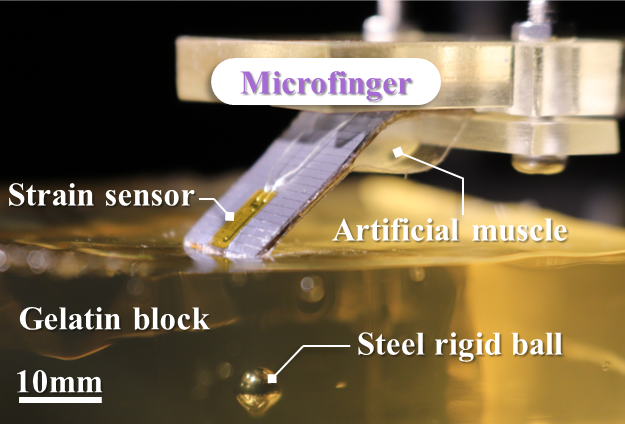
鏡視下手術において触覚情報を収集し術者をサポートする手術支援デバイスの研究を行っています。触覚センサが集積された指型ロボットを用い、臓器内部の腫瘍の位置推定に取り組んでいます。
触覚センサを集積したマイクロフィンガーによる硬さ特異部探査のための指向性タッチセンシング
(Directional touch sensing for stiffness singularity search in an object
using micro finger with tactile sensor)
<研究概要>
培養細胞組織の操作を可能にするデバイスの研究を行っています。柔軟かつ生体適合性を持つ素材を生かし生体分野への応用研究に取り組んでいます。
hMSC操作のためのソフトマイクロフィンガーの実装
(Implementation of soft microfingers for a hMSC aggregate manipulation
system)