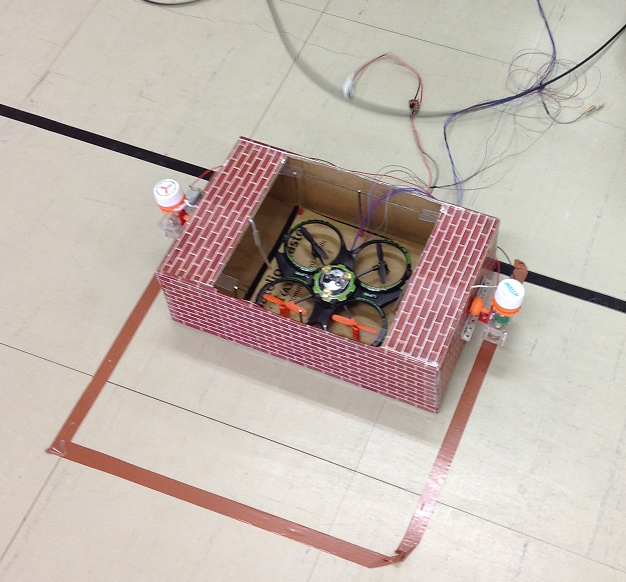
<3rd place>
The robot using acceleration of human wrist
This robot is moved using acceleration of human wrist.
Students who made this robot challenged the flight locomotion.
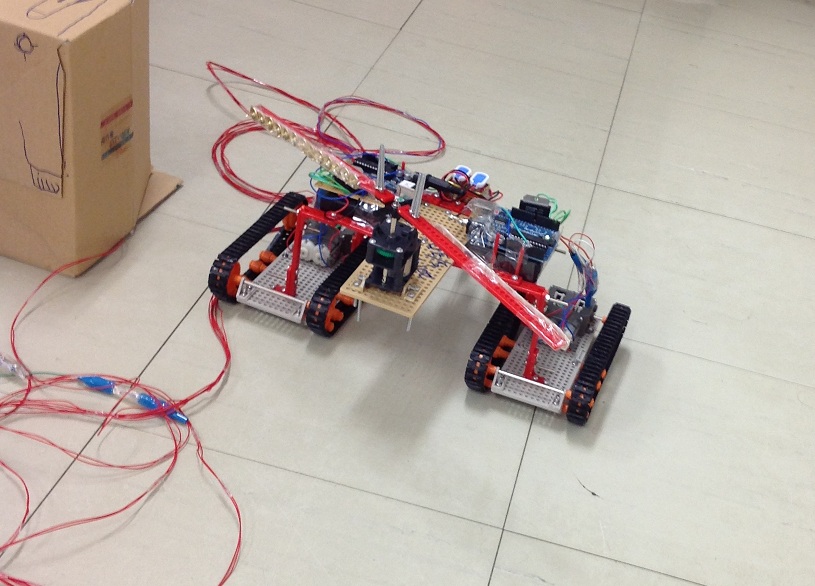
<1st place>
The robot using human brease
The locomotion method of this robot is caterpillar drive, and human brease
was used
to control the caterpillars and manpulator for breaking ballons.
<2nd place>
The robot using acceleration of human arms and leg
Acceleration of human arms and leg is used to controll this robot.
Previous Robocon
Robocon in 2013
Robocon 2013
~ 風戦(Fusen) ~
【Abstranct】
Developed robots broke ballons arranged in the field, and the nubmer of
baloons thar were broken were contested.
Biosinals used as control signals were accelerarion of human body and
human brease.
【Date】
May 30, 2013
【Developed robots】
【Video of the robocon 2013】