分野
装置・デバイス
天井、壁面を用いた
物流及び空間の再構成のためのロボット
Robots on the ceiling and the wall
for logistics or devices replacement

李 周浩 教授
BACKGROUND
研究の背景
空間そのものが人間の活動を支える「空間知能化」
明かりをつけたいライトを指さすと、スイッチが自動的にオンになる、といったように、空間全体に知能を与え、人間の活動を支援させるという「空間知能化」が私の研究テーマです。若いころに親しんだSF映画のような世界を実現するため、ロボット単体ではなく、空間全体がロボットと連動することで人間を支えるような仕組みを作りたいと思ったのがきっかけでした。
空間に知能を与えるというのは、「空間に脳や目玉をつける」ということ。センサやデバイスを分散配置し人間の行動を認識させることで、空間が人間の要求を理解し、対応できるようにします。研究を進める中で、大きな壁となったのが動的な状態への対応です。知能を持つ空間の中で動き続ける人間に対して、常に最適な状態を作るには知能化空間の脳や目玉であるセンサやデバイスそのものを動的にする必要があるという結論に至りました。例えば、静的な空間では一度照明を設置してしまうと、動かすことはできません。その空間の中を人間は動き回ることになり、照明は常に「ベストな状態」ではなくなります。「ベストな状態」を維持するためには、センサやデバイスも空間の状態に合わせて動く必要があります。このような動的な空間の変化に対応し、人間がより快適な生活を送ることを可能にするのが、私の開発しているロボット「MoMo」です。
FEATURE
シーズの特徴
あらゆる状況で人間にとって最適な空間を実現するロボット「MoMo」
MoMoという名前は“Mobile Module”の略称。名前が表す通り、空間内を自由自在に動き回り、動的な空間を実現することができます。MoMoにセンサやデバイスを搭載し、人間の行動に合わせて、常にベストな空間を形成する知能化空間を「R+iSpace」と呼んでいます。「iSpace」は「Intelligent Space(知能化空間)」を表しています。「R+」は「再構築が可能(Re-configurable)」な動的な空間であるということを意味しています。MoMoは空間内を自由自在に動き回り、状況に合わせてセンサやデバイスを最適な場所に配置する役目を担う、自走式のロボットです。
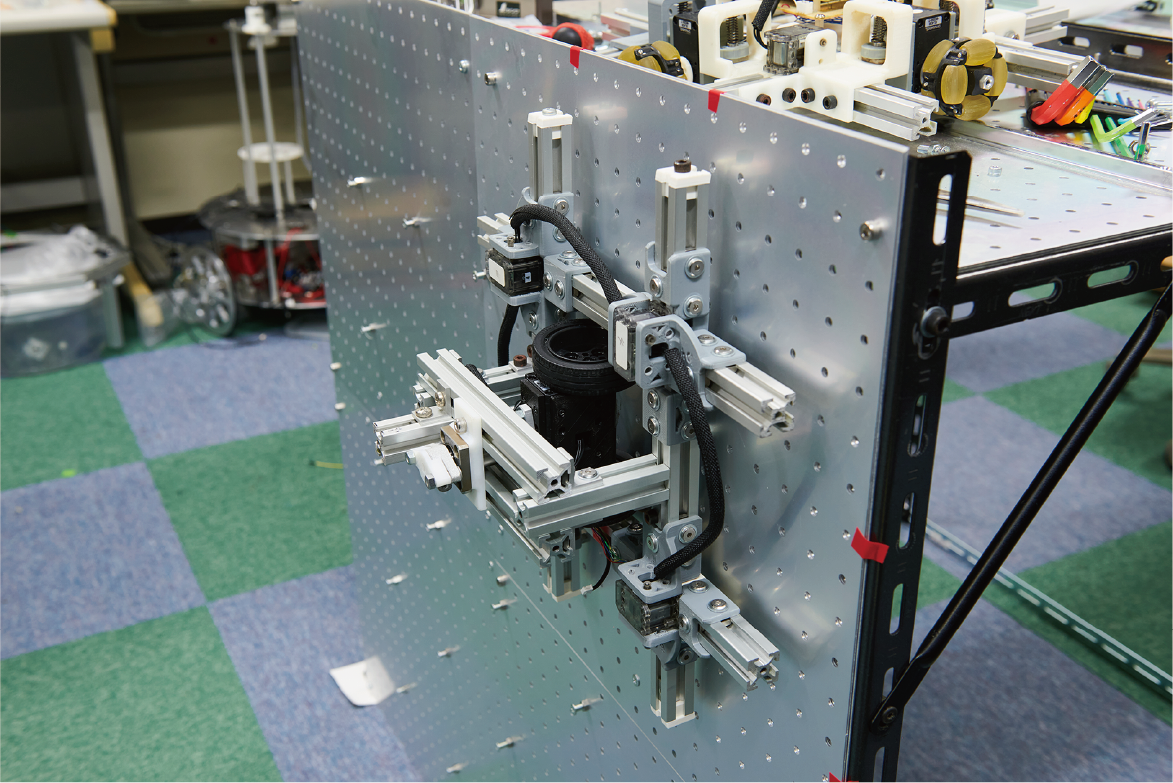
この技術のポイントは人間と住み分けを行い、同じ空間に共存しながらも、互いが干渉しないことを可能にしている点です。MoMoは天井や壁に一定間隔で設置された突起を伝って移動します。すなわち、「MoMo=天井と壁面」、「人間=床」という異なる平面状を移動しているため、ストレスなく共存することが可能になりました。もう一つの特徴が、空間側に大規模な移動用設備が不要な点です。MoMoに内蔵されたレールが、空間側に設置された小さな突起と結合して移動する仕組みを考案。空間側の設備を最小限に抑えることで、導入しやすさと移動の自由度が格段に向上しました。人間のあらゆる行動を認識・追従し、快適な状態を作り出すロボットの実現に一歩近づいたと考えています。今後は、MoMo本体の小型化を実現し、人間との共存のストレスを限りなく小さくすることが当面の目標です。
VISION
解決したい未来
李教授が目指す、人間とロボットの「完全な共存」
私が目指すのは人間とロボットの「完全な共存」です。空間の拡張や、ロボットのための大規模な設備の設置を前提とした技術では「完全な共存」は望むべくもありません。MoMoに対応した建設資材を用いて家を建てさえすれば、あとはMoMoを設置するだけ。家電量販店等でMoMoを購入し、一般家庭で気軽に導入できるような未来を実現し、空間知能化を一般化することが狙いです。そこへ向けての第一段階として、病院や介護施設、撮影スタジオ等の特殊な環境への導入を進めたいと考えています。MoMoが自在に動き回り、それぞれの状況に合わせた最適な空間を実現できるよう、開発を続けていきます。
