
「立命館大学の展示ブース」
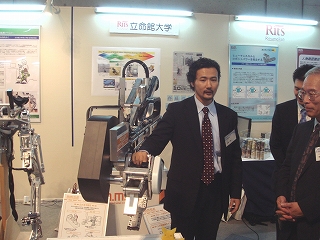
パワーペダルを展示発表した金岡克弥・理工学部講師

21世紀COEプログラム「京都アート・エンタテインメント創成研究」の成果のひとつである「バーチャル京都3Dマップ」 |
「産学官連携推進会議」に立命館大学からブース出展
6月16日(土)〜17日(日)、国立京都国際会館において、内閣府、総務省、文部科学省、経済産業省、日本経済団体連合会及び日本学術会議が主催する「産学官連携推進会議」が行われた。この会議において、立命館大学からは、7つのブースを出展した。
「産学官連携推進会議」は、国際競争の一層激化する中で、人口減少下の我が国が持続的な成長を実現するには、社会システムや人材面を含めたイノベーションを全国各地で起こしていく必要があるという視点に立って、政府関係者、産官学連携の推進を担う第一線のリーダーや実務経験者等が一堂に会する会議。今年度で6回目を数える。
立命館大学からは、「身近」「役立つ」「体感型」をキーワードとして選出した、最新の研究シーズ・成果を紹介。いずれのブースも大盛況となった。
金岡克弥・理工学部講師は、松下電器産業と共同開発した「パワーペダル」を展示発表。「パワーペダル」とは、人間の下半身に装着して脚力を増幅できるロボットスーツである。自転車のサドルのようないすに腰掛け、ペダルを踏んで歩く動作をすると、センサーが検知し、モーターが動く仕組みで、前後、左右など6方向の動きにロボットが忠実に従うため、でこぼこ道などで歩き方が複雑になる場合にも対応できる。今後さらにコストダウンを図り、脚力の弱い高齢者や障害者の歩行補助用として商品化する予定。2005年に開発した50キログラムの重量を持ち上げられる上半身用ロボットスーツと併用して、災害救助活動に使うことも想定している。
【立命館大学から紹介した研究シーズ・成果】
- 石油汚染土壌を効率的に浄化する「バイオレメディエーション装置」
- 移動する人物もクリアに追跡・把握できる「顔画像認識システム」
- MEMS技術の生体デバイスへの応用「パイロポリマーMEMS」
- 人間の力を増幅し、マシンと人間のよさを融合させる制御ロボット「マンマシンシナジーエフェクタ」
- 災害時、混乱する建物内からの避難サポートアプリケーション「RFIDを用いた新しい避難誘導システム」
- 21世紀COEプログラム「京都アート・エンタテインメント創成研究」研究成果
- 立命館大学の産官学連携活動について
|
・「バーチャル京都3Dマップ」のHPはこちら
・2007年度グローバルCOEプログラムの採択の詳細はこちら
<2007年6月19日掲載>
|