
2011年1月8日更新
- 川村貞夫
- 立命館大学理工学部ロボティクス学科教授

- 工学博士。1956年大阪生まれ。1986年大阪大学大学院基礎工学研究科博士課程修了。1987年から立命館大学。2011年4月から日本ロボット学会会長。日本学術会議連携会員。研究テーマは「多関節構造体の科学とその応用」。「最近では特技の合気道(6段)の技をロボット工学として説明しています。そのほうが学生たちも理解してくれるようです」
写真右は開発チームのリーダー・柴田瑞穂(客員研究員)。立命館大学大学院で博士号を取得後、水中ロボット研究に従事。「琵琶湖にCoCoが棲む日が楽しみです」

-
2本の腕とハンド(手)を持ったロボットが実験用プールの底を目指して進み、コーヒー缶を器用につかんで再び浮上していく-。湖や海中で潜水士に代わって作業を行う「ロボット・ダイバー」はその容姿から湖の虎「CoCo(湖虎)」と命名されている。
愛らしい目の部分にはカメラが搭載され、CoCoが見る深水の世界は同時に陸上の操縦者にも伝えられる。生みの親の川村貞夫は「CoCoを自由に泳がすにはある程度の慣れは必要かな」と語るが、操縦方法に難しい部分はほとんどない。CoCoは琵琶湖の環境保全に貢献するために作られた。
「すでに湖底のゴミ拾いを何度かやっていますが、古タイヤも引き上げているので、重さ5~6キロくらいのモノまで耐えられます」
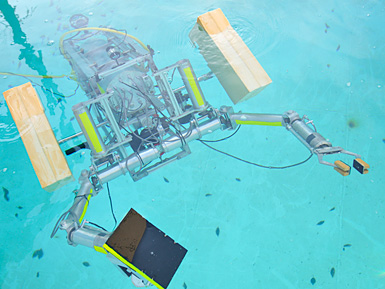
- これが「ロボット・ダイバーCoCo」両側の白い2つのフロート(浮き)で姿勢を保持する。

- 琵琶湖の底からタイヤを引き上げるCoCo
パワーはあるが、CoCoはとてもスマートだ。胴体は長さ70センチ、直径20センチのアルミの円筒。腕はハンドの先端まで含めても約60センチ。全部で58キロ程度の重量だから、小型のボートでも運搬できる。
「深海での作業も可能なアーム付きの水中ロボットはありますが、重量は数トン。私たちは1人で操作できるポータブルなロボットを目指しました。琵琶湖の底には100ヵ所以上の遺跡が確認されています。CoCoとなら湖底を自由に探査し、縄文人の暮らしや文化を知ることができるでしょう」
日本近海の海底には、希少金属を含む熱水鉱床が多数存在している。将来、CoCoが海底を探査し海洋開発の一端を担うことも期待できる。

- 琵琶湖の10億分の1サイズの実験プール「ナノびわ」
現在、CoCoは研究室近くにある琵琶湖の10億分の1サイズの実験プール「ナノびわ」で、様々な練習をしている。初めて潜った琵琶湖底ではちょっとしたトラブルも発生した。
「ケーブルが湖底のゴミに絡まり、ゴミ拾いが逆にゴミになりかけて(笑)。私は諦めそうになりましたが、操縦の上手な学生が絡まったケーブルを解き、無事に救出することができました」
2つの発泡ウレタンによるフロート(浮き)で姿勢を保持する仕組みは世界でも初。
「もっと機敏に動き、センサーなどで琵琶湖の調査・探査もできるようにしたい。テレビ報道などで日本のロボットは相当に進んでいると感じるでしょうが、現実にはまだまだ発展途上です。課題はたくさんありますが、将来、世界の海や湖のあちこちで数多くの水中ロボット『CoCo』が活躍することを夢みて挑戦し続けています」
AERA 2011年1月8日発売号掲載 (朝日新聞出版)

ナノびわで空き缶を拾うCoCo
このページに関するご意見・お問い合わせは 立命館大学広報課 Tel (075)813-8146 Fax (075) 813-8147 Mail koho-a@st.ritsumei.ac.jp
