Heads: Shinichi Hirai
Contact: Ikumi Okada
Date: 2013 -
Mailing address:
Dept. Robotics, Ritsumeikan Univ.
Kusatsu, Shiga 525-8577, Japan
Supported by:
Associated lab/group:
|
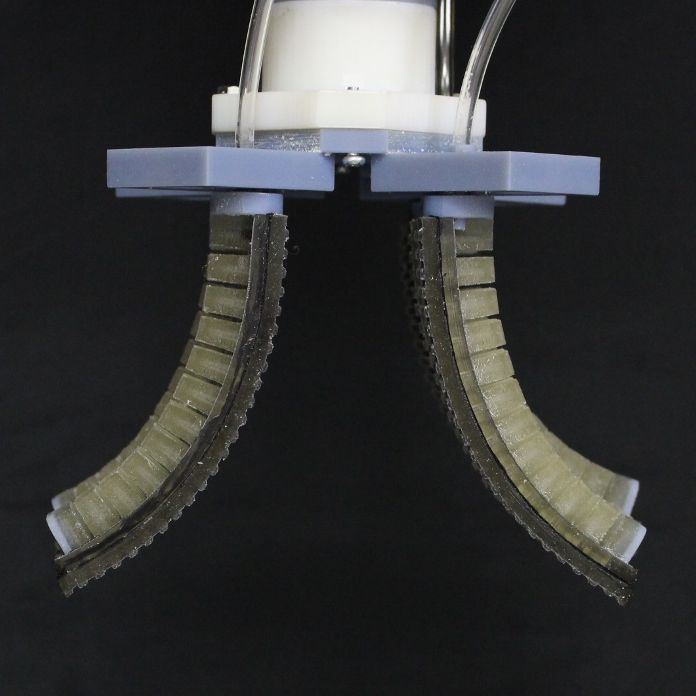
Binding Hand
Heads: Shinichi Hirai Date: 2013 -
Mailing address:
Supported by:
Associated lab/group:
|
| Project Description |
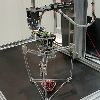
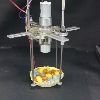
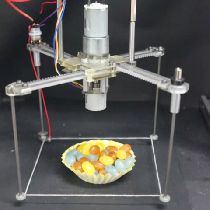
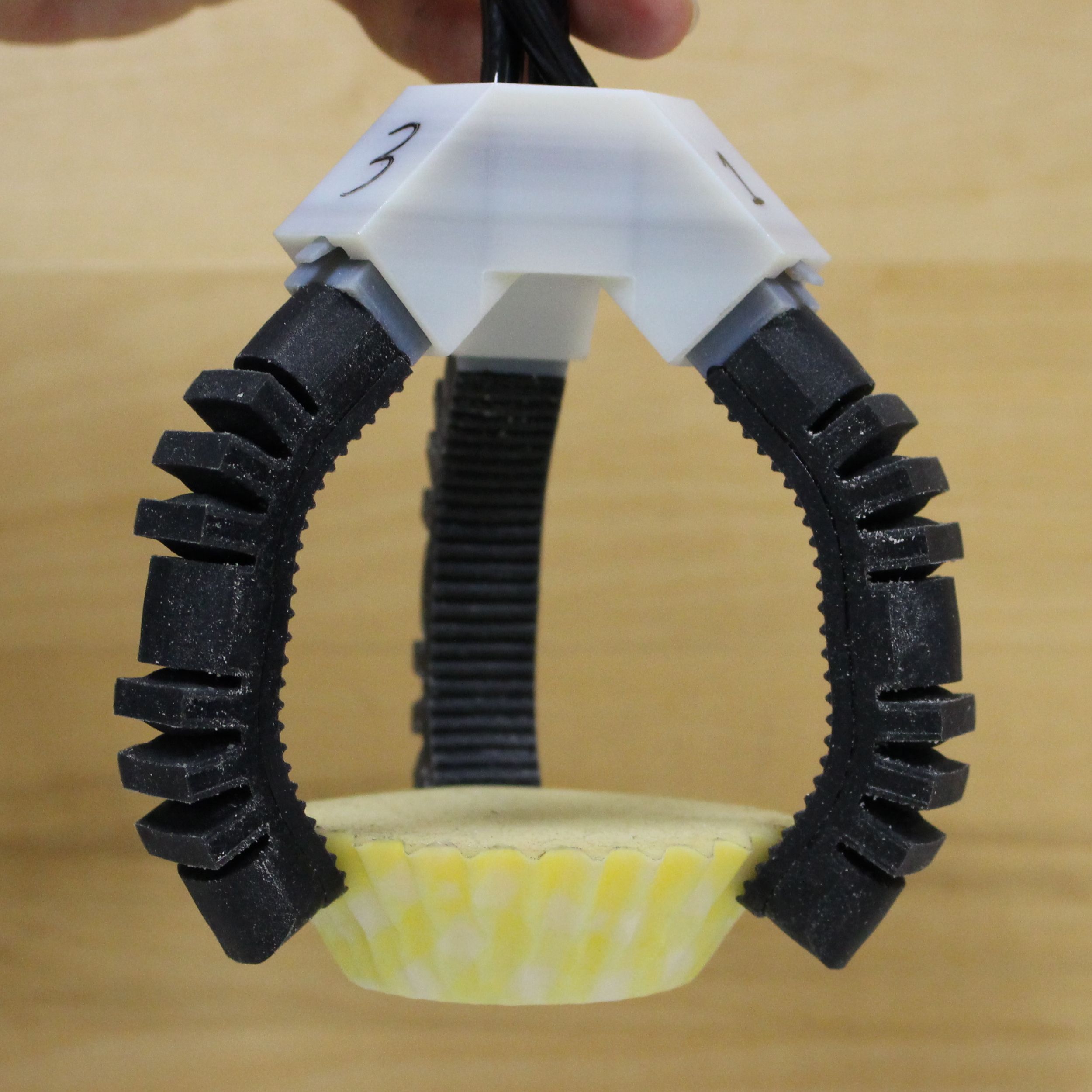
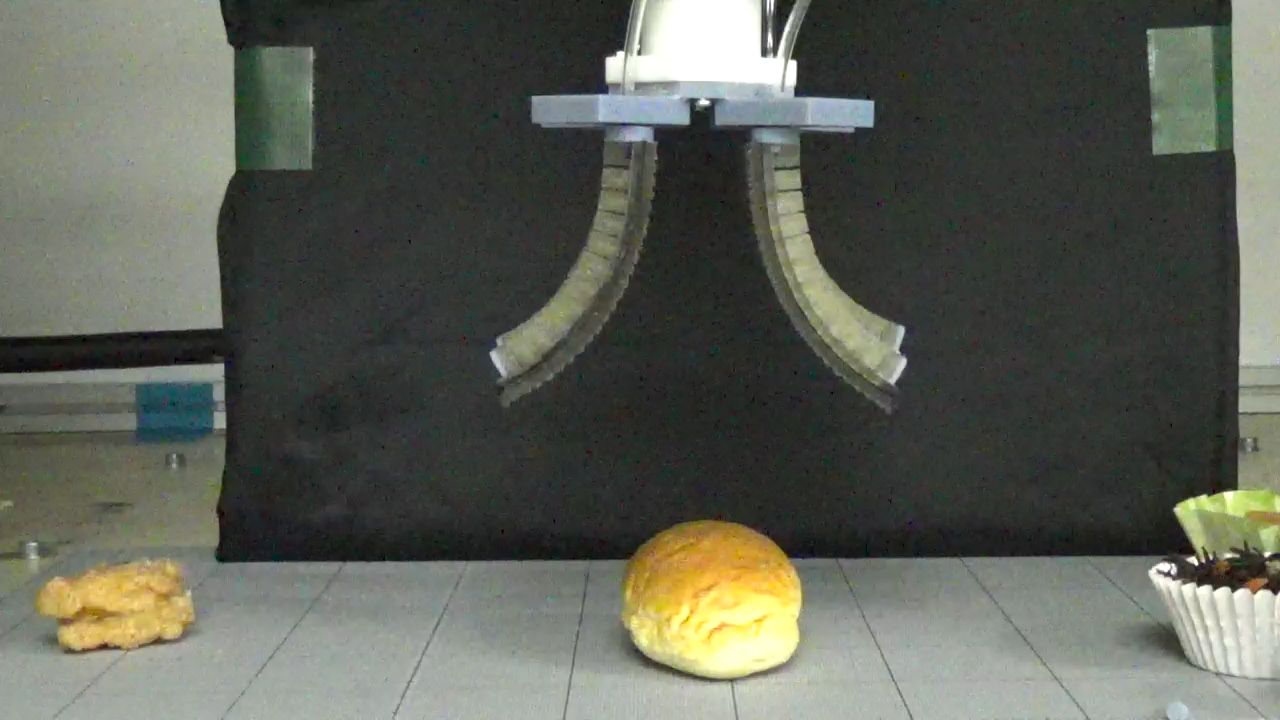
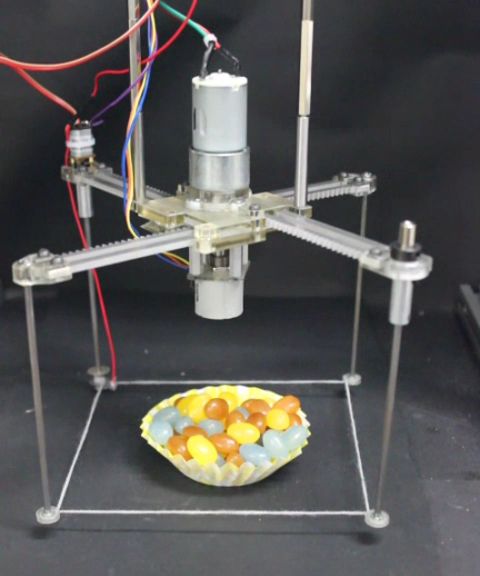
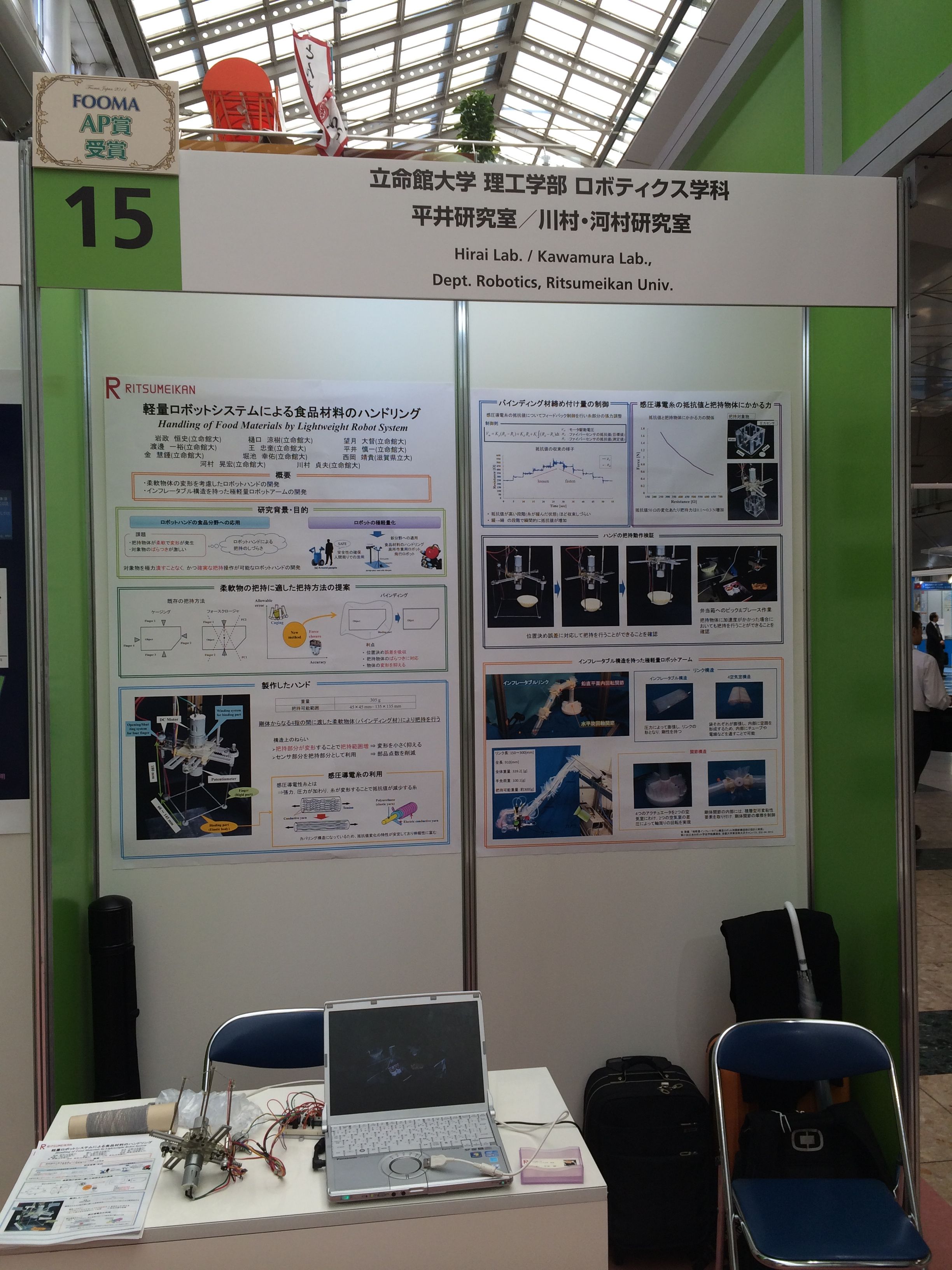
We propose a novel robotic hand based on the concept of binding to grasp and handle soft food materials. Binding applies elastic threads instead of rigid fingers for grasping. Binding hands are capable of picking up deformable cups with food materials and packing them in to a lunch box.
| 2019/7/11 | Received AP Award (visitors' evaluation) at International Food Machinery and Technology Exhibition. |





|
|
| 2019/3/5 | Ms. Okada received SI2018 Excellent Presentation AwardSI for her presentation Modeling ripping force in binding hand at SICE SI2018. |
| 2019/3/1 | Soft grippers were introduced in March issue of magazine "Production Goods Marketing". |
| 2019/2/1 | Soft grippers were introduced in February issue of magazine "Production Goods Marketing". |
| 2018/10/3 | Introducing Private University Research Branding Project of MEXT Soft materials bring robotic research to a new level |
| 2018/6/14 | Received AP Award Grand Prix at International Food Machinery and Technology Exhibition. |





|
|
| 2018/6/12-6/15 | Introducing printable hand, prestretched-finger hand, and binding hand at FOOMA 2018 Acadamic Plaza, with demonstration of ROS-based robotic handlnig system. |
|
|
| 2018/6/12 | Our research on soft robotics was introduced in an article of Kanjuku Times, a magazine of Kanjuku school. |
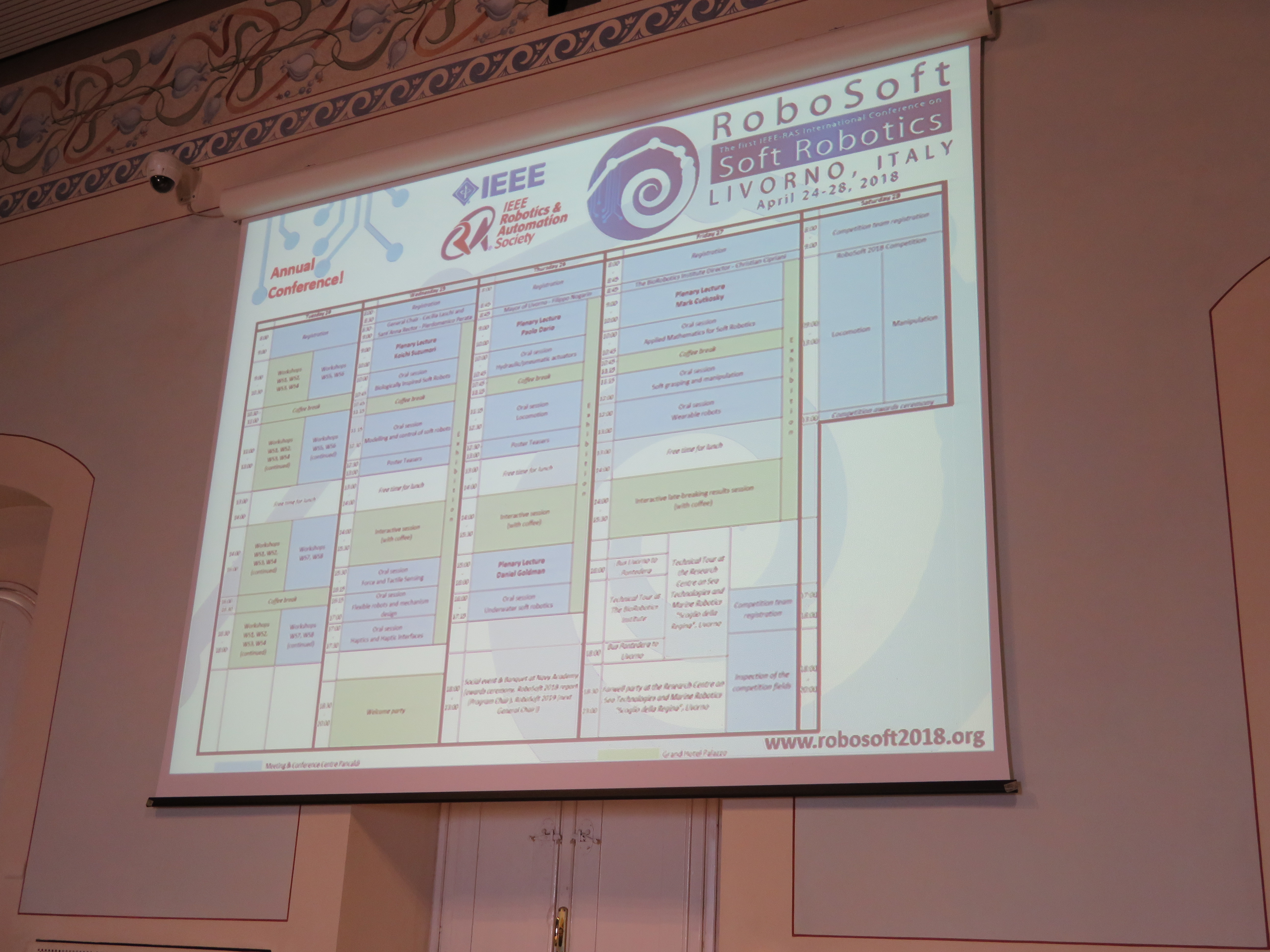
| 2018/4/24-4/28 | The First IEEE-RAS Int. Conf. on Soft Robotics (RoboSoft 2018) at Grand Hotel Palazzo, Livorno, Italy |




|
|
| 2017/12/8 | The 3rd meeting of RSJ Special Interest Group on Soft Robotics (SIG SoRo Japan) |
| 2017/11/16 | "Soft Robotic Hands for Food Material Handling" at FOOMA 1Day Special Lectures |
| 2017/10/20 | Invited Presentation Soft Robotics for Locomotion and Manipulation in Special Session Soft Robotics at 17th Int. Conf. on Control, Automation and Systems (ICCAS 2017). |
| 2017/6/15 | Received AP Award Grand Prix at International Food Machinery and Technology Exhibition. (Univ. web page) |




|
|
| 2017/6/13-6/16 | Demonstrating Soft Robotic Hands for Food Material Handling at International Food Machinery and Technology Exhibition |
| 2017/4/30 | Asahi Shimbun introdiced our soft robotics research in Door to Science. |
| 2016/6/9 | Received FOOMA Academic Plaza Award at International Food Machinery and Technology Exhibition. |
| 2015/12/21 | Presenting "Binding Hands for Food Material Handling" at Fishery Machine Seminar organized by Industrial Research Institute, Hokkaido Research Organization |
| 2015/12/2-5 | Demonstrating binding hands and micro pneumatic valves at International Robot Exhibition |

|
|
| 2015/11/27 | Presenting "Binding Hands for Food Material Handling" at Press Seminar in Tokyo Campus, Ritsumeikan University |
| 2014/6/12 | Received FOOMA Academic Plaza Award at International Food Machinery and Technology Exhibition. (pick up) |



|
|
| 2014/6/10-13 | Presented "Handling of Food Materials by Lightweight Robot System" at Academic Plaza of FOOMA 2014 |
|
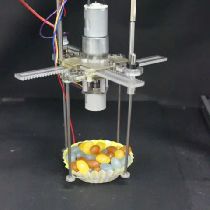
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/pick-bound.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/pick-lift.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/pick-liftup.jpg) |
| Binding hand picking up a cup with jerry beans | |||
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-1.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-2.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-3.jpg) |
![[pick up]](https://www.hirailab.com/pub-images/bindinghand/align-4.jpg) |
| Binding hand centering a misaligned cup | |||
| Personnel |
| Name | Title | Degree | |
| Yuuya Kono | Graduated | Master of Eng. | |
| Ikumi Okada | Graduated | Master of Eng. | |
| Tomohiro Yamada | Graduated | Master of Eng. | |
| Hisashi Iwamasa | Graduated | Master of Eng. | |
| Yuuta Matsumoto | Graduated |
| Publications |
| Notes |
|
|
|
| Related Sites |