実 物 写 真
|
||
|---|---|---|
| 駆動原理 | 積層型圧電アクチュエータに交流を流し、振動させる。この振動でアクチュエータと一体化しているアームも前後に共振させてクロールする。左右のアクチュエータを制御することで、前進、左右の回転を行う。 | |
| 特 徴 | ・部品数が少ないため製作、修理が容易だが、調整に時間がかかる。 ・高アスペクト比構造体なので倒れやすい。 ・斜毛を用いていない。 |
|
構 造 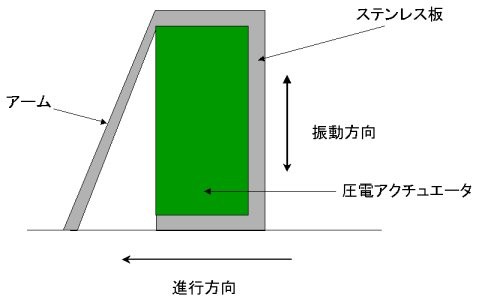 |
||
| 1cm3 マイクロロボット 圧電クロール型 2001年 | |
|---|---|
| 設計・製作 | 東海林志有、橋本圭嗣、佐藤仁彦 |
| ロボット名 | ジャム猫 |
国際マイクロロボットジョイントコンテストに出場し、 |
|
実 物 写 真
|
||
|---|---|---|
| 駆動原理 | 積層型圧電アクチュエータに交流を流し、振動させる。この振動でアクチュエータと一体化しているアームも前後に共振させてクロールする。左右のアクチュエータを制御することで、前進、左右の回転を行う。 | |
| 特 徴 | ・部品数が少ないため製作、修理が容易だが、調整に時間がかかる。 ・高アスペクト比構造体なので倒れやすい。 ・斜毛を用いていない。 |
|
構 造 |
||
