実 物 写 真
|
||
|---|---|---|
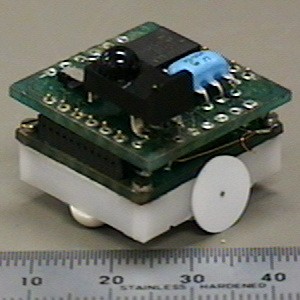
| 駆動原理 | 本体の下部に小型ステップモータを2個同軸に配置、タイヤを直接駆動し走行する。下部基板にモータとドライバを配置し、上部基板にマイクロコンピュータを搭載している。 |
|
| 特 徴 |
|
|
構 造 
|
||
| 1cm3 マイクロロボット 電磁型 2001年 | |
|---|---|
| 設計・製作 | 加藤
史樹、久瀬 亘、磯田 康吉 |
| ロボット名 | ヤス君 |
国際マイクロロボットジョイントコンテストに出場し、 |
|
実 物 写 真
|
||
|---|---|---|
| 駆動原理 | 本体の下部に小型ステップモータを2個同軸に配置、タイヤを直接駆動し走行する。下部基板にモータとドライバを配置し、上部基板にマイクロコンピュータを搭載している。 |
|
| 特 徴 |
|
|
構 造
|
||