| 澤村 陽二、宮川 圭司 | |
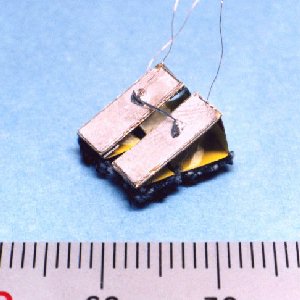
| ブザー1号 | 第4回国際マイクロロボットメイズコンテストに出場。 |
|
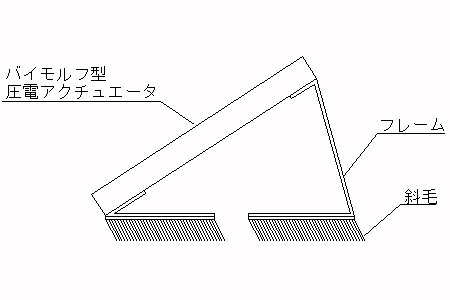
バイモルフ型圧電振動板に交流電圧を印加して共振させることにより変位を発生させる。 その変位をフレームを介して斜毛に伝え、斜毛の進行異方性を利用して推進力を得ている。 左右一対を組み合わせ、それぞれ独立に駆動制御し方向転回を行わせることが出来る。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 澤村 陽二、宮川 圭司 | |
| ブザー1号 | 第4回国際マイクロロボットメイズコンテストに出場。 |
|
バイモルフ型圧電振動板に交流電圧を印加して共振させることにより変位を発生させる。 その変位をフレームを介して斜毛に伝え、斜毛の進行異方性を利用して推進力を得ている。 左右一対を組み合わせ、それぞれ独立に駆動制御し方向転回を行わせることが出来る。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ