| 二川 幸司、村岡 広樹 | |
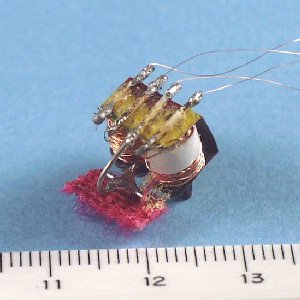
| スイーパー | 第5回国際マイクロロボットメイズコンテストに出場し、 敢闘賞を受賞。 |
|
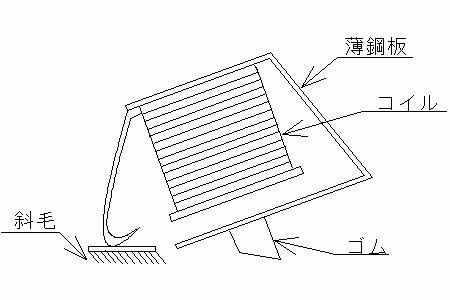
コイルに交流電流を流し、発生した交番電磁力で薄鋼板を振動させ、ゴムの摩擦力で推進力を得る。 左右一対を組み合わせ、それぞれ独立に駆動制御し方向転回を行わせることが出来る。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 二川 幸司、村岡 広樹 | |
| スイーパー | 第5回国際マイクロロボットメイズコンテストに出場し、 敢闘賞を受賞。 |
|
コイルに交流電流を流し、発生した交番電磁力で薄鋼板を振動させ、ゴムの摩擦力で推進力を得る。 左右一対を組み合わせ、それぞれ独立に駆動制御し方向転回を行わせることが出来る。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ