| 笹井 英一、田所 秀介 | |
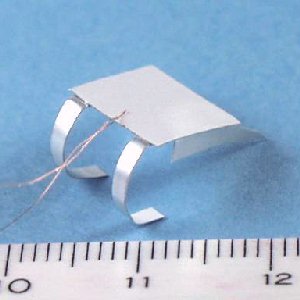
| キャンサー | 第5回国際マイクロロボットメイズコンテストに出場し、 デザイン賞を受賞。 |
|
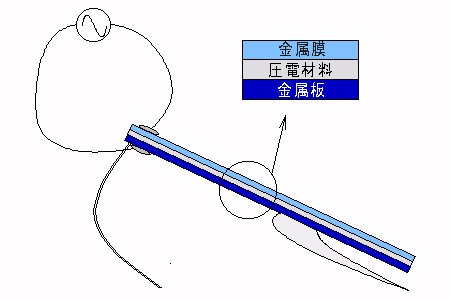
圧電振動子に交流電圧を印加して共振させ、その振動を駆動力として前進させる。 周波数を変化させ左右の方向転回を行わせる。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 笹井 英一、田所 秀介 | |
| キャンサー | 第5回国際マイクロロボットメイズコンテストに出場し、 デザイン賞を受賞。 |
|
圧電振動子に交流電圧を印加して共振させ、その振動を駆動力として前進させる。 周波数を変化させ左右の方向転回を行わせる。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ