| 井上 泰伸、近藤 亮史、澤 和也 | |
| 進んです。 | 第5回国際マイクロロボットメイズコンテストに出場し、 アイデア賞を受賞。 |
|
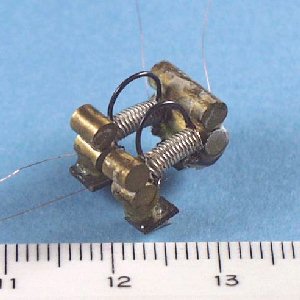
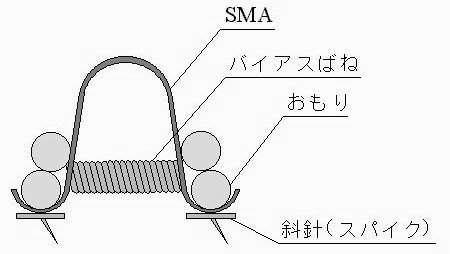
形状記憶合金(SMA)にバイアスばねを取り付け、予め弾性歪みを与え、 通電発熱によりSMAの形状が回復して伸長し、通電を止めると バイアスばねにより再び収縮する。 このサイクルを繰り返して前進させる。左右組み合わせ回転を行わせる。 周期は長いがSMAの直接的な変位は大きい。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 井上 泰伸、近藤 亮史、澤 和也 | |
| 進んです。 | 第5回国際マイクロロボットメイズコンテストに出場し、 アイデア賞を受賞。 |
|
形状記憶合金(SMA)にバイアスばねを取り付け、予め弾性歪みを与え、 通電発熱によりSMAの形状が回復して伸長し、通電を止めると バイアスばねにより再び収縮する。 このサイクルを繰り返して前進させる。左右組み合わせ回転を行わせる。 周期は長いがSMAの直接的な変位は大きい。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ