| 大村 雅章、三谷 由美 | |
| Elegant | 第6回国際マイクロロボットメイズコンテストに出場し、 3位入賞。 |
|
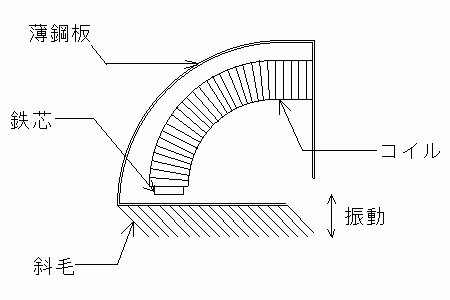
コイルに交流電流を流し、発生した電磁力で薄鋼板を振動させ、薄鋼板底部に貼り付けた。 斜毛により推進させる。左右2つの電磁石を制御し、右回転・左回転・前進を行う。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 大村 雅章、三谷 由美 | |
| Elegant | 第6回国際マイクロロボットメイズコンテストに出場し、 3位入賞。 |
|
コイルに交流電流を流し、発生した電磁力で薄鋼板を振動させ、薄鋼板底部に貼り付けた。 斜毛により推進させる。左右2つの電磁石を制御し、右回転・左回転・前進を行う。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ