| 西山 寛二、山本 秀俊 | |
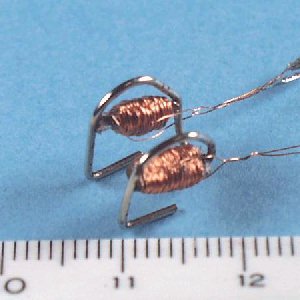
| じわっと1号 | 第6回国際マイクロロボットメイズコンテストに出場し、 アイデア賞を受賞。 |
|
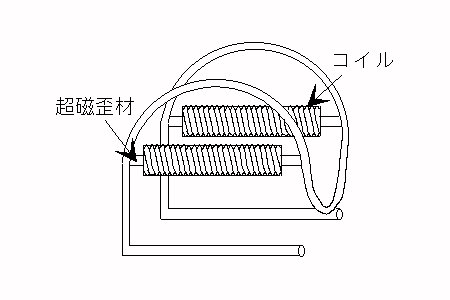
コイルに交流電流を流し、磁界を発生させ超磁歪材料に一定方向の磁界をかけることで 進行方向に平行なその伸びを推進力とする。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 西山 寛二、山本 秀俊 | |
| じわっと1号 | 第6回国際マイクロロボットメイズコンテストに出場し、 アイデア賞を受賞。 |
|
コイルに交流電流を流し、磁界を発生させ超磁歪材料に一定方向の磁界をかけることで 進行方向に平行なその伸びを推進力とする。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ