| 瀧本 晋輔、西 信嘉 | |
| RD-1 | 第7回国際マイクロロボットメイズコンテストに出場し、 マイクロロボット山登りメイズコンテストの部(カテゴリー1)で優勝。 |
|
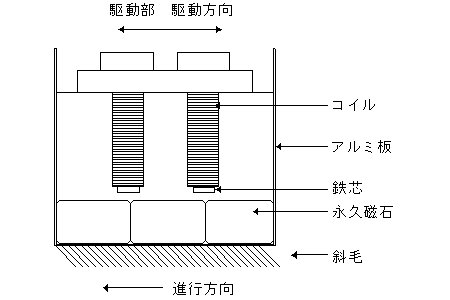
本体底部に上面の極を交互に変えた3つの永久磁石を配置し、頭部に設けた2つのコイルに交流 を流すことにより、前後方向の振動を発生させ、それを斜毛に伝えて前進させる。そして、左 右の電磁石を制御することにより、右回転、左回転、前進を行う。 |
|---|---|
|
| |
| |

マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 瀧本 晋輔、西 信嘉 | |
| RD-1 | 第7回国際マイクロロボットメイズコンテストに出場し、 マイクロロボット山登りメイズコンテストの部(カテゴリー1)で優勝。 |
|
本体底部に上面の極を交互に変えた3つの永久磁石を配置し、頭部に設けた2つのコイルに交流 を流すことにより、前後方向の振動を発生させ、それを斜毛に伝えて前進させる。そして、左 右の電磁石を制御することにより、右回転、左回転、前進を行う。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ