| 進元 幸治、谷本 靖忠、横山 好彦 | |
| Defiant | 第7回国際マイクロロボットメイズコンテストに出場し、 マイクロロボット競争の部(カテゴリー0)で優勝。 |
|
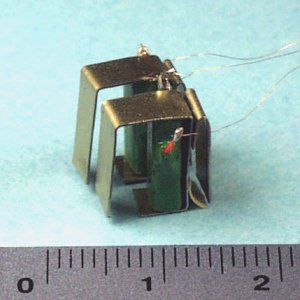
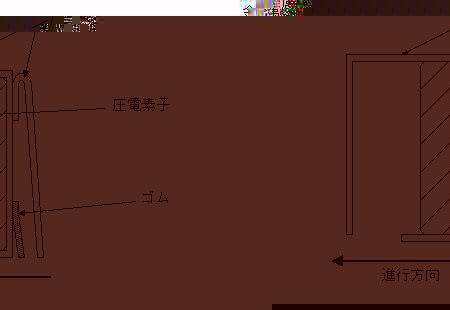
積層型の圧電素子を金属板ではさみ込み、圧電素子に交流電圧を印加し、 金属板を共振させることにより駆動させる。左右の圧電素子を独立して 制御することにより右回転、左回転、前進をすることが可能になっている。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ
| 進元 幸治、谷本 靖忠、横山 好彦 | |
| Defiant | 第7回国際マイクロロボットメイズコンテストに出場し、 マイクロロボット競争の部(カテゴリー0)で優勝。 |
|
積層型の圧電素子を金属板ではさみ込み、圧電素子に交流電圧を印加し、 金属板を共振させることにより駆動させる。左右の圧電素子を独立して 制御することにより右回転、左回転、前進をすることが可能になっている。 |
|---|---|
|
| |
| |
マイクロロボットのトップへ 研究内容のトップへ 研究室のトップへ