実 物 写 真
|
|
|---|---|
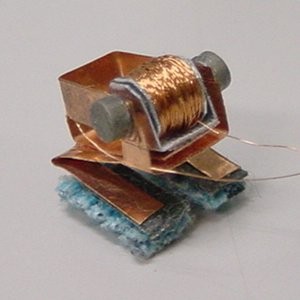
| 駆動原理 | コイルに交流電流を流し、発生した電磁力で銅版の側面に取付けた永久磁石を振動させ、この振動を斜毛に伝えて前進する。また左右の板バネは厚みが異なっており、コイルに流す電流を板バネの共振周波数に合わせることによって方向制御を行う。 |
| 特 徴 |
|
構 造  |
|
| 1cm3 マイクロロボット 電磁型 1999年 | |
|---|---|
| 設計・製作 | 吉藤健次、若見学司 |
| ロボット名 | ヴァルキリー |
第8回マイクロロボットコンテスト マイクロ競争の部(カテゴリー0) とマイクロロボット山登りコンテストの部(カテゴリー1) にて 3位 を獲得 |
|
実 物 写 真
|
|
|---|---|
| 駆動原理 | コイルに交流電流を流し、発生した電磁力で銅版の側面に取付けた永久磁石を振動させ、この振動を斜毛に伝えて前進する。また左右の板バネは厚みが異なっており、コイルに流す電流を板バネの共振周波数に合わせることによって方向制御を行う。 |
| 特 徴 |
|
構 造 |
|