分野
装置・デバイス
食材に混入する
異物の触覚センシング
Tactile image sensor for food inspection

下ノ村 和弘 教授
OUR FIELD
研究の概要、狙い
ロボット作業化の鍵となる「触覚」を研究する
人がやる方が早いと言われるような複雑な作業を機械に置き換える際には、触覚が鍵となります。例えば、さまざまな角度から部品を組み立てる場合、部品の角度や差し込み位置を視覚(カメラ)だけですべて捉えるには時間も手間もかかるので、触覚も使って判断できると効率的です。私は、高性能の触覚センサーを作り、ロボット作業化を進めたいという思いで研究を続けてきました。食品加工は今後ロボット化が期待される典型的な分野です。今回は、人の目で見て手で触るしかないとされている、エビの殻残留確認作業を機械化できないか挑戦しました。
FEATURE
シーズの特徴
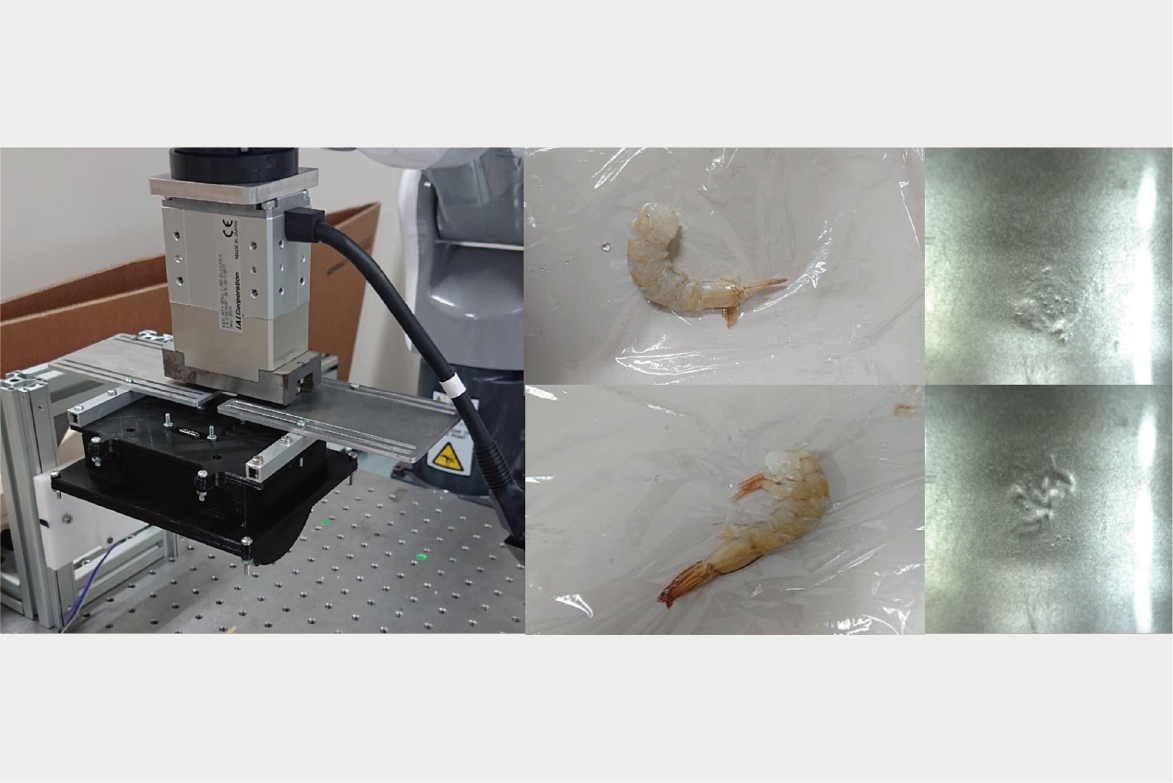
カメラを用いた触覚センサーが小さな異物を検知する
点状の計測点が並んだセンサーは既に実用化されていますが、感知部分の間隔が1ミリ程度あり、小さな異物は検知し損ねる懸念があります。そこで空間分解能力を高くするために、カメラを用いるアイデアを考案。検出対象となる異物混入状態のエビは、柔らかいエビの上に硬い殻がある状態です。ゲル状のセンサーをエビの表面に押し付け、エビ本体と殻の硬さの境界線を“ゲルの沈み方の差=影ができるところ”としてカメラで視覚的に捉えます。それにより、カメラに映る領域ならば死角なくかつ連続して、さらに画像の取得とほぼ同時に異物の有無を判定できるのです。対象となる食材と異物によって、適切な押し付け力や検出の閾値は異なります。実用化に向け、これらの項目を対象物の特性に合わせて調整し、産業の現場に実装することが現在の目標です。


VISION
解決したい未来
人間と機械が助け合うことで、誰もが生きがいを感じる世界へ
人と機械が得意分野を生かして作業内容を分担し助け合うことで、ディーセントワーク(働きがいのある人間らしい仕事)をすべての人々にもたらすSDGsの実現にもつながると考えています。カメラを用いた触覚センサーの原理研究は30年前から行われていましたが、カメラとコンピュータの性能が上がり、さらにAIのディープラーニングや識別機能などとも相性がいいため、ここ5年ほどで発展が著しい分野です。機械導入の難しい手作業や人材不足に関する現場のニーズをヒアリングできる機会として、今回の見本市に期待しています。