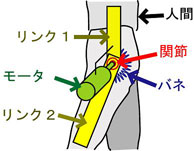
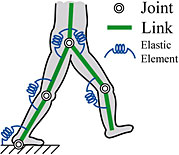
大きく言うと、私の研究対象は「ロボット」です。ロボットも自発的に動こうとするときには、人間と同じように体を動かす筋肉や腱が必要となります。私はその「筋肉や腱」となる部分に「バネ」を使うことでロボットの運動の効率化を高める研究を行っています。バネを使うことによって少ないエネルギーでロボットを制御することが可能になり、将来的には、ヒューマノイドロボット(人間型ロボット)などで柔軟で自由な動きを実現したり、さらなるエネルギーの効率化が期待できます。
今回提出した論文のタイトルは「A New Control Method Utilizing Stiffness Adjustment of Mechanical Elastic Elements for Serial Link Systems」(日本語訳: 多関節ロボットに対する剛性調節を利用した新しい制御方法)というものでした。賞はICRAへ論文を提出した日本の学生研究者15人のうち5人に与えられる「IEEE Robotics and Automation Society Japan Chapter Young Award」として選ばれるもので、そのうちの一人に私が選ばれました。実は今回、ICRAへの論文の提出は3度目でした。1回目は大学院のマスター時代の研究を引き継いだ内容、2回目は「バネを使ったパワーアシスト」の研究発表を行いました。今回の内容は、2回目の研究をより複雑にしたものです。IEEEは世界最大の電気電子学会で、ICRAは毎年開催されるロボットに関する世界最高峰の国際会議です。そこで表彰されたことは研究者として大変名誉なことでした。 |