STORY #5
Robots that Move Freely Across Walls and Ceilings to Realize Optimum Space


Jooho Lee, Ph.D.
Professor, College of Information Science and Engineering
Intelligent Space is a way of
Supporting People by Making
Space Itself More Intelligent
New in-home assistant robots, such as cleaning robots and smart speakers, are being released in the market in rapid succession. In the meantime, research on Intelligent Space—a technology designed to support humans by turning the spatial surroundings themselves intelligent—is also underway. “The idea is to make the entire space itself smarter so that it can understand and respond to human demands by working in conjunction with other robots, rather than the robot working by itself,” explains Jooho Lee. The concept is to install cameras and sensors in a space to act as the eyes and brain so that they may recognize people’s movements and requests. They share the gathered information with devices in the same space via a network, and in cooperation with robots and other devices, provide various information and services.
Lee reveals that one of the challenges in making a given space intelligent has been the limited number of places and locations where sensors and devices can be placed. “In static spaces, once sensors, cameras, or devices are fixed in place, there is no easy way to move them. In fact, people had no choice but to move towards the sensors and devices as necessary,” he says.
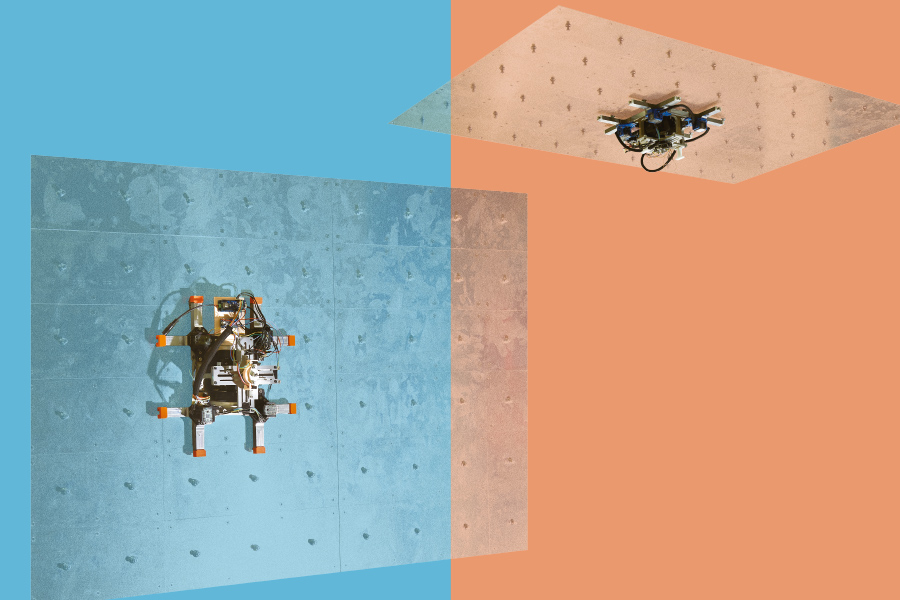
In dynamic spaces, where people and objects move around and change locations, it is rather the sensors and devices, and not the people, which move to the optimal position to provide services and assistance in accordance with demands. Lee’s research has been aiming to achieve such an intelligent space. Currently under development is an innovative mobile module robot, MoMo (from mobile module), that can freely move around walls and ceilings and reconstruct the layout of the given space.
While robots that can run on walls and ceilings have been developed in the past, the main technical challenge has been to make those robots defy gravity and remain on the ceiling’s surface. Lee has resolved this challenge by coming up with a completely novel concept for MoMo’s operating mechanism. The key to the breakthrough has been the creation of a mechanism on the ceiling’s surface to hold the robots in place.
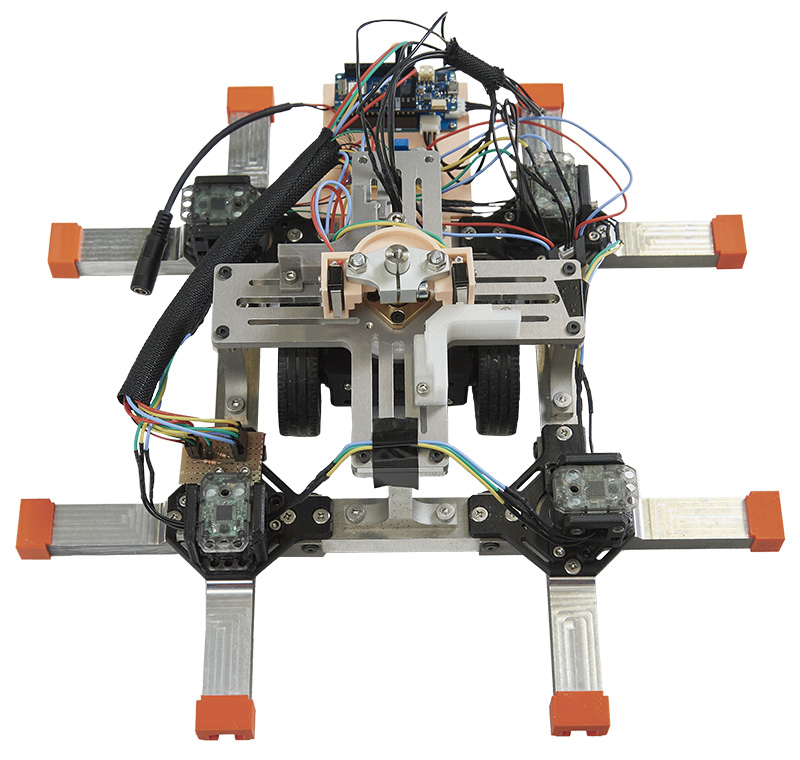
First, evenly spaced-out protrusions are placed on the wall or ceiling, and the rails attached to MoMo’s body grip and latch onto these protrusions, preventing it from falling in the direction of the gravitational force. The body’s center has a movement mechanism that allows omnidirectional movement on a plane, allowing for up-, down-, left-, and right-ward movements.
According to Lee, there will be many new advantages aside from overcoming previous challenges by applying this new mechanism. “Since MoMo is mechanically attached to the protrusions placed on the walls, the robot’s structure itself can be made extremely simple, and it requires no energy to hold on to its position. Compared to existing wall-climbing robots that require energy to stay in their position, MoMo is energy-efficient. Also, there is no concern of falling due to dirt or some unevenness on the wall’s surface,” Lee explains. He further asserts that the evenly spaced protrusions help the robots locate their position accurately and prevent positioning-related errors.
Furthermore, the new mechanism Lee has developed is distinct from that of existing rail-based cargo-carrying robots. “Hospitals and factories have adopted a system in which objects are transported via rails mounted on the ceiling. But such systems are limited to moving objects on a predesignated track only. It is not realistic to lay so many rails in all directions, and even if we were able to lay such rails, complicated switching mechanisms would need to be installed at every intersection.” To address this conundrum, Lee has come up with an idea that inverts the traditional method completely; instead of laying rails on the walls or the ceiling, he embedded the rails on MoMo itself, allowing freedom of movement in all four directions.
The advantage of wall-climbing robots is that it allows people and the robots to have their own space. “Robotic household electronics that share the same floor space with humans could get in the way of humans. However, Momo, which uses the walls and ceiling to move around, can coexist without interfering or being interfered with by humans sharing the same space,” says Lee, pointing to the ideal form of human and robotic coexistence.
What are the practical applications of MoMo? “For example, by attaching sensors, cameras, and other devices specific to a given purpose on MoMo, it could change the layout of a room automatically according to the person’s needs, such as moving the lighting source to where the person is or moving the clock, a projector, or paintings to a more appropriate location. Other applications include moving walking aids along with people to prevent them from falling, attaching chairs to the device, and using it as a simple stair climber. I believe it can also be used in residential spaces to provide support to residents in their daily lives or for their nursing care,” says Lee. Of course, there are also diverse possibilities for applications in factories and commercial facilities.
The latest experimental robot is 345 × 345 × 55 mm in size, weighing 1.85 kg. The robot has evolved to the point where accurate movements are achieved at a speed of 13.50 cm/sec. Load tests have verified that it can carry a load of up to 2 kg on a wall’s surface and 1 kg on a ceiling’s surface without slowing down. “Eventually, larger or smaller robots will become available according to their applications,” he says.
Speed is one of the current challenges. “The reason for this challenge is that when the wheels are weighed down to make contact with the wall’s surface, the frictional force between the rails and the protrusions increases, which leads to aggravation of resistance. We want to improve the structure to eliminate resistance and accelerate the traveling speed,” says Lee. In addition, he is currently trying to develop a technology that will allow the robots to move from the wall’s surface to the ceiling, i.e. from one plane to another.
“The features required in a home differ with age and family structure. The optimum spaces are realized to match the people who live there, expanding and augmenting the functions over the years to meet their needs. I want to make such intelligent space come true,” Lee envisions. MoMo may become a standard feature in every home, supporting people’s lifestyles through every stage of their lives. Such a future may be awaiting us.
- Jooho Lee, Ph.D.
- Professor, College of Information Science and Engineering
- Specialties: Robotics, Computer Vision, Machine Learning
- Research Themes: Intelligent Space, Advertising Robots, AI-Assisted Medical Support, Nursing Care Support Robots