Heads: 松野 孝博
Contact: 宮越 陸矢
Date: 2019 -
Mailing address:
立命館大学ロボティクス学科
〒525-8577 滋賀県草津市野路東1-1-1
Supported by:
科学研究費補助金(新学術領域研究ソフトロボット)JP21H00333
ウェットコンタクトの力学と粘滑物ハンドリングへの応用
Associated lab/group:
新竹研究室(電気通信大学)
|
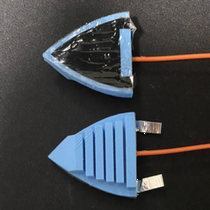
柔軟指の曲げセンシング
Heads: 松野 孝博 Date: 2019 -
Mailing address:
Supported by:
Associated lab/group:
|
| 研究内容 |
本研究の目的は,ポリマーセンサを柔軟指に埋め込み,指の曲げをセンシングすることである.センサ信号から,指の曲げ振動や把持の際の滑りを検出することを目指す.
| 担当 |
| 名前 | 学年 | 学位 | |
| 宮越 陸矢 | Graduated | 工学修士 | |
| 草薙 真之介 | Graduated |
| 研究発表 |
| 参考資料 |
| 関連サイト |