1Lightweight and Flexible Robot with a Simultaneous Variable Compensation Mechanism for Gravity and Gripping Force
Conventional robots are heavy and rigid in order to achieve high end-effector positioning accuracy.
When such robots come into contact with an object, the object or the robot itself is likely to be damaged.
As a result, the applications of robots have been severely limited.
Next-generation robots capable of performing the same tasks as humans need to be able to easily make contact with objects.
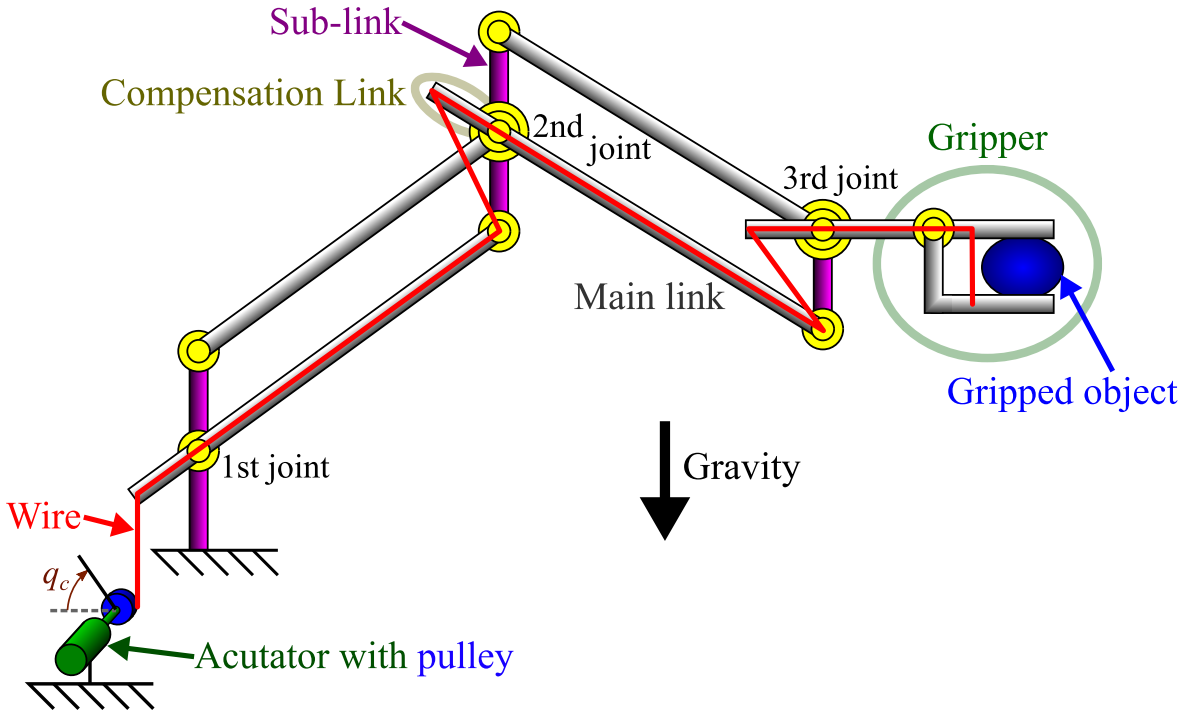
In this research, we proposed a simultaneous variable compensation mechanism for gravity and gripping force that reduces the torque required by the actuators at each joint.
When the required torque is reduced, small actuators become sufficient at each joint,
and the reduction ratio of the reducers used in the actuators can be decreased.
This enables robots to be made lightweight and flexible.
This mechanism can generate both the gripping force required when the robot's end-effector grasps an object and the gravity compensation torque using a single actuator located at the base of the robot.
Similarly, when humans grasp and lift a heavy object, the flexor digitorum superficialis muscle works to simultaneously produce grip strength and wrist/elbow torque.
That is, the proposed mechanism is also interesting and reasonable from the viewpoint of biomechanics.
Experiments have confirmed that this mechanism can reduce torque by about 90% during static conditions.
Variable gravity and gripping force compensation mechanismOverview of the proposed mechanism
2Lightweight and Flexible Robots Using Advanced Materials and Wire-Driven Mechanisms
To achieve even lighter and more flexible robots, we are building robots that use advanced materials and wire-driven mechanisms.
In a wire-driven mechanism, the force generated by actuators such as electromagnetic motors is transmitted to each joint via wires.
This removes the need to place actuators on the distal parts of the robot, which are strongly affected by gravity and move significantly, making the robot lighter and more flexible.
In humans too, most of the muscle mass is concentrated near the torso rather than at the extremities of the hands and feet.
We propose new design methods and mechanisms for such wire-driven robots.
In conventional wire-driven robots, the wires tended to break under the loads generated during operation.
In recent years, however, the mechanical performance of chemical fiber ropes has improved dramatically, reaching strengths that surpass metal wires of the same diameter.
By using such advanced materials, we aim to realize lightweight and flexible robots that were previously difficult to achieve.
Furthermore, lightweight and high-strength structural parts made of carbon fiber are becoming available.
By combining these technologies, we aim to realize robots capable of contact tasks that were not previously possible.
With the prototype shown in the video below, we have confirmed that the robot can continue to operate without issue even when the end-effector collides with a desk, enabling contact tasks easily.
3High-Balance-Capability Legged Robot Control Using Angular Momentum around the Ankle
We propose a control method that improves the balancing capability of legged robots.
Conventional legged robot control has relied on the robot's center-of-mass position and velocity and the zero moment point (ZMP)
to maintain balance.
However, this approach ignores rotation around the center of mass.
Therefore, if the robot rotates around its center of mass, it may fall in the worst case.
In contrast, our proposed method using the angular momentum around the ankle considers rotation around the center of mass.
Accordingly, it can properly handle cases where the robot rotates around its center of mass.
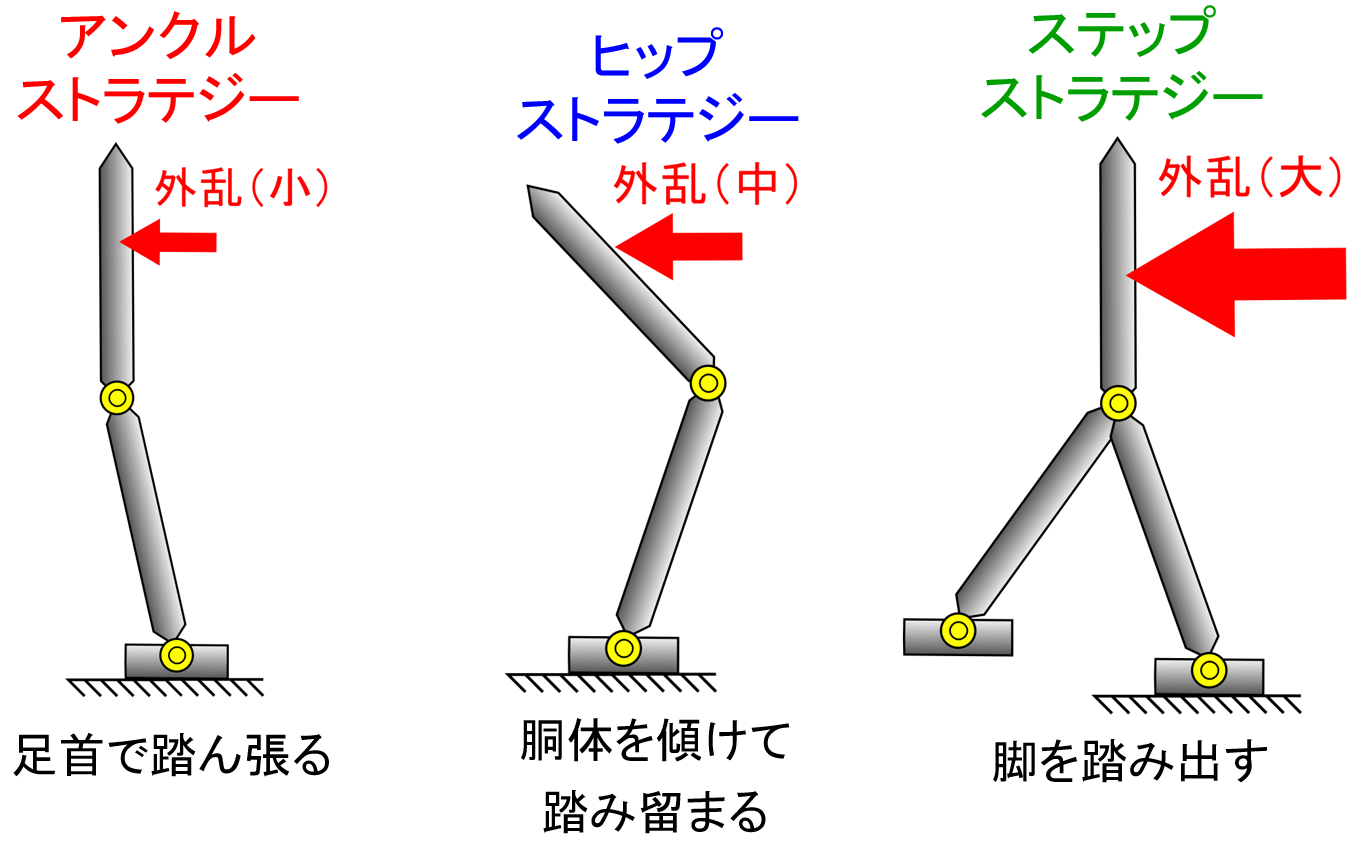
By integrating this method with balance control that maximizes the stability region, we have also proposed a way to optimally switch between ankle-torque-based balance control, balance control that additionally uses body-posture adjustment, and stepping control, as shown in the figure below.
This maximizes the balancing capability of legged robots.
It has long been known that humans also primarily use ankle torque to resist small disturbances, then tilt the torso when the ankle alone is insufficient, and finally take a step when even that is not enough.
Thus, this control method is also interesting from the perspective of biological motor control.
Furthermore, this control method can maintain balance even in cases that were difficult with conventional methods, such as tiptoe standing.
This enables balance to be maintained even when the sole cannot make sufficient contact with rough terrain, and eliminates the need for actuators at the ankle, making legged robots lighter and less expensive.
「Standing and Stepping Control with Switching Rules for Bipedal Robots based on Angular Momentum around Ankle」
Mitsunori Uemura, Hiroaki Hirai
International Journal of Humanoid Robotics, to appear
4Energy-Saving and High-Motion-Performance Control Using Variable Stiffness Mechanisms
Ordinary robots drive each joint using only actuators such as electromagnetic motors.
In contrast, living organisms move efficiently by using not only the forces exerted by their muscles but also the elasticity (springs) of muscles and tendons.
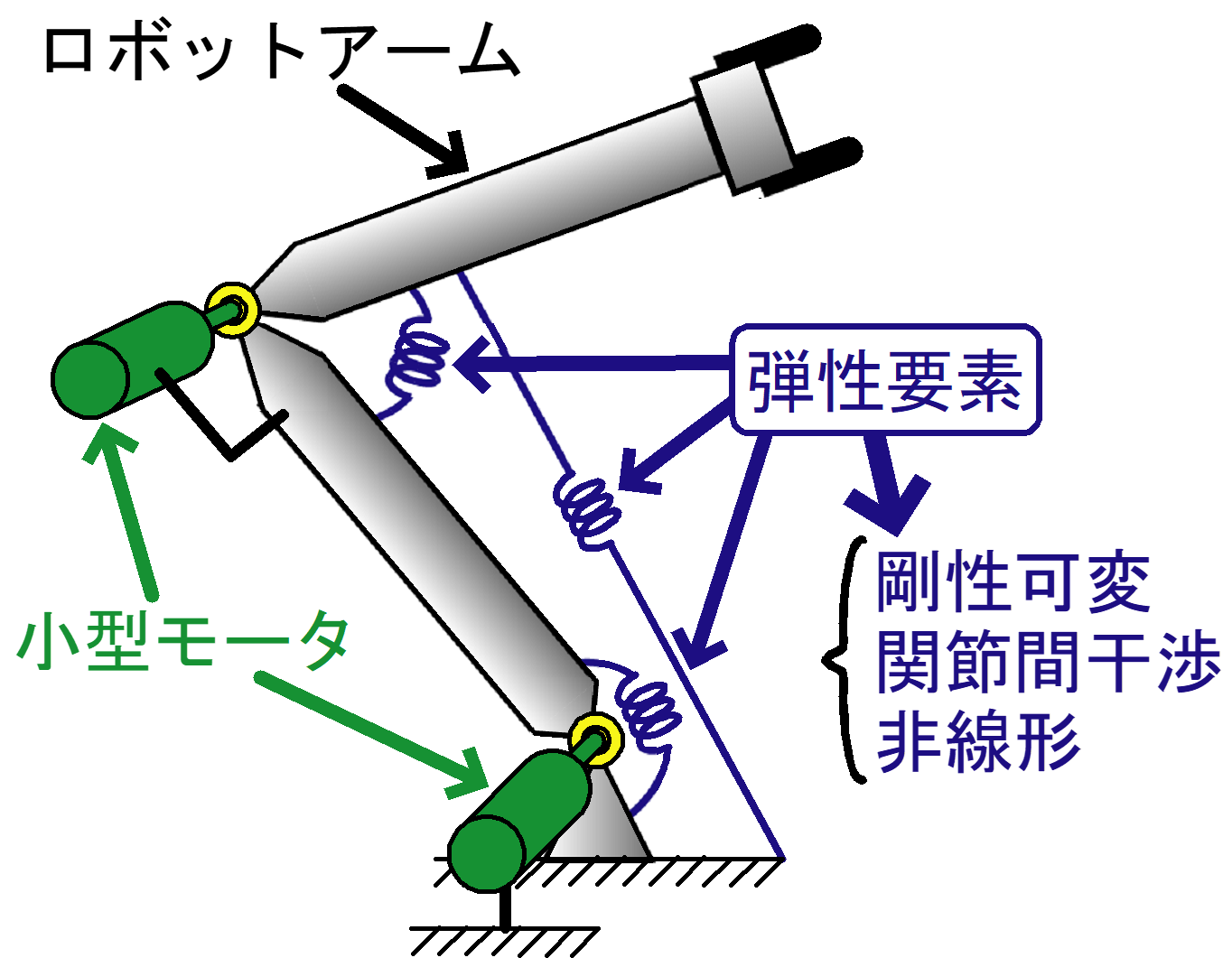
In this research, we combine actuators at each robot joint with mechanical elements whose elasticity can be adjusted, as shown below,
and propose a highly energy-efficient control method that automatically optimizes the stiffness.
The stability of the control system has been proven mathematically, contributing to the theoretical foundations of robot control.
To realize a compact and lightweight variable-stiffness mechanical element, we also propose a new mechanism as shown below.
Experiments using this mechanism together with stiffness-optimizing control have confirmed that the robot's periodic motion can be achieved with about one-sixth the energy consumption.
Moreover, we have proposed a control method that simultaneously optimizes stiffness and motion patterns, and experimentally confirmed that energy consumption can be reduced to roughly one-twentieth.
Going forward, we plan to apply this control method to high-energy-efficiency operation of pick-and-place tasks, walking, and more.
Robot equipped with a variable stiffness mechanismCompact and lightweight variable stiffness mechanism
5Real-Time Object Recognition by Touching and Moving
Conventional robots need to recognize objects extremely precisely because unexpected contact with an object can break the object or the robot.
However, object recognition becomes extremely difficult when the object information is unknown, when objects overlap one another, or when objects are deformed.
As a result, when a robot operates in an unstructured environment, the tasks it can perform are severely limited or its motion becomes extremely slow.
In contrast, the lightweight and flexible robot arms we have been developing can easily come into contact with objects.
Leveraging this feature, it becomes possible to touch and move objects even when they cannot be recognized in detail.
This enables object recognition based on the motion of the object.
For real-time recognition based on the motion of unknown objects, the technology known as SLAM (Simultaneous Localization And Mapping), also used in autonomous driving, has advanced rapidly in recent years.
In this research, we apply SLAM to robotic object recognition and are constructing a completely new real-time object recognition method based on touching and moving.
6Smart Robot Design Using Advanced Design and Manufacturing Technology
In recent years, 3D printers capable of printing metal or continuous carbon fiber, and 3D CAD software capable of topology optimization, have become available.
These technologies have the potential to revolutionize conventional manufacturing.
In fact, aircraft engines manufactured with metal 3D printers have attracted significant attention for achieving improved fuel efficiency and substantial reductions in part counts.
These technologies are expected to greatly contribute to the sophistication and lightweighting of parts and sensors in robotics as well.
Our lab also has a 3D printer capable of printing continuous carbon fiber.
This printer can produce parts with stiffness and strength comparable to aluminum but weighing only about half as much, and it can also print parts with complex shapes.
As a first step, we are prototyping lightweight and highly back-drivable reducers.
Going forward, we plan to establish design methodologies using these technologies and to build robot hands capable of dexterous tasks.