
| 研究概要 |
本研究の目的は,柔らかい素材で構成されるソフトセンサにより,力覚・触覚・近接覚を実現することである.導電布や導電糸,エラストマー等の柔らかい素材を用いてセンサを構成する.センサの材料や構造,センシングアルゴリズムに関する研究を進める.
ロボットが環境と接触して作業を進めるためには,力覚や触覚,近接覚が重要である.接触領域に柔らかい材料を導入し,その材料がロボットと環境とのソフトインターフェースとして働くことにより,ロボットが環境の不確定性を吸収しながら作業を遂行することが可能になる.このようなロボットにおいては,柔らかいセンサが必要になる.そこで本研究では,ソフトインターフェースに埋め込むことが可能なソフトセンサに関する研究を進める.
|
|
|
|
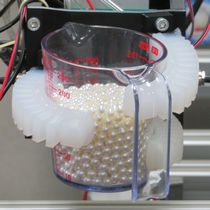
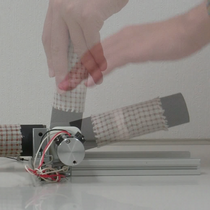
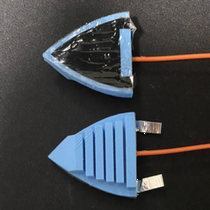
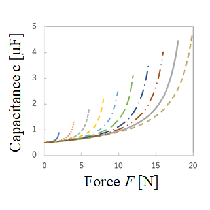
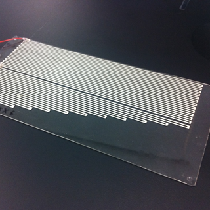
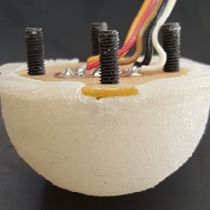
| IPMCセンサ内蔵ソフトハンド | 導電布地センサ | 柔軟指の曲げセンシング | 静電容量型力覚センサ |
|
|
|
|
| 面状曲げセンサ | 柔軟指先センサ | 繊維センサ |
| 2024/11/7 | 研究成果最適展開支援プログラム(A-STEP)産学共同ステージ I(育成フェーズ)に採択 ソフトロボットハンドの把持特性を判定可能なフレキシブルセンサおよびその制御モデルの開発 |
| 2022/12/6 | フレキシブルセンサーでソフトロボットハンドの「つかむ、放す、つかみ損ねる」をセンシング〜食品パッキングの自動化への重要技術〜 |
| 2022/12/1 | フレキシブルセンサーでソフトロボットハンドの「つかむ、放す、つかみ損ねる」をセンシング〜食品パッキングの自動化への重要技術〜 |
| 2022/10/23 | IROS 2022のワークショップ Large-scale robotic skin: Perception, Interaction, and Control で Fabric-based Proximity/Contact Sensors Applied to Two-DOF Variable Stiffness Mechanism と題して発表 |

|
|
| 2021/3/11 | 電波新聞の記事で松野先生の近接センシングアルゴリズムに関する研究が紹介されました. |
| 予算 |
| 研究発表 |
| 関連サイト |