Magnetic Levitation / Magnetic Bearing
■Development of a seismic control device using magnetic levitation
This research aims at the development of a seismic control device that reduces vibration of houses caused by the earthquake. The device is suspended from the roof, and floats in the air by the magnetic levitation. Depending on the timing of vibration of the roof, part of the device is brought into contact with the roof. The friction force generated between the roof and the device is used to reduce the vibration of the house. Since vibration is not directly transmitted to the levitating device, the device also has a base isolation structure that can protect objects contained in the device.
■Development of a linear actuator using magnetic levitation technology
The conveying direction and range of current conveying system is limited by the fix guide rail. In this research, to solve the above problem, a new conveying system with high degree of freedom is developed based on magnetic levitation technology without any guide rails.
■Magnetic levitation control using camera to detect rotor position
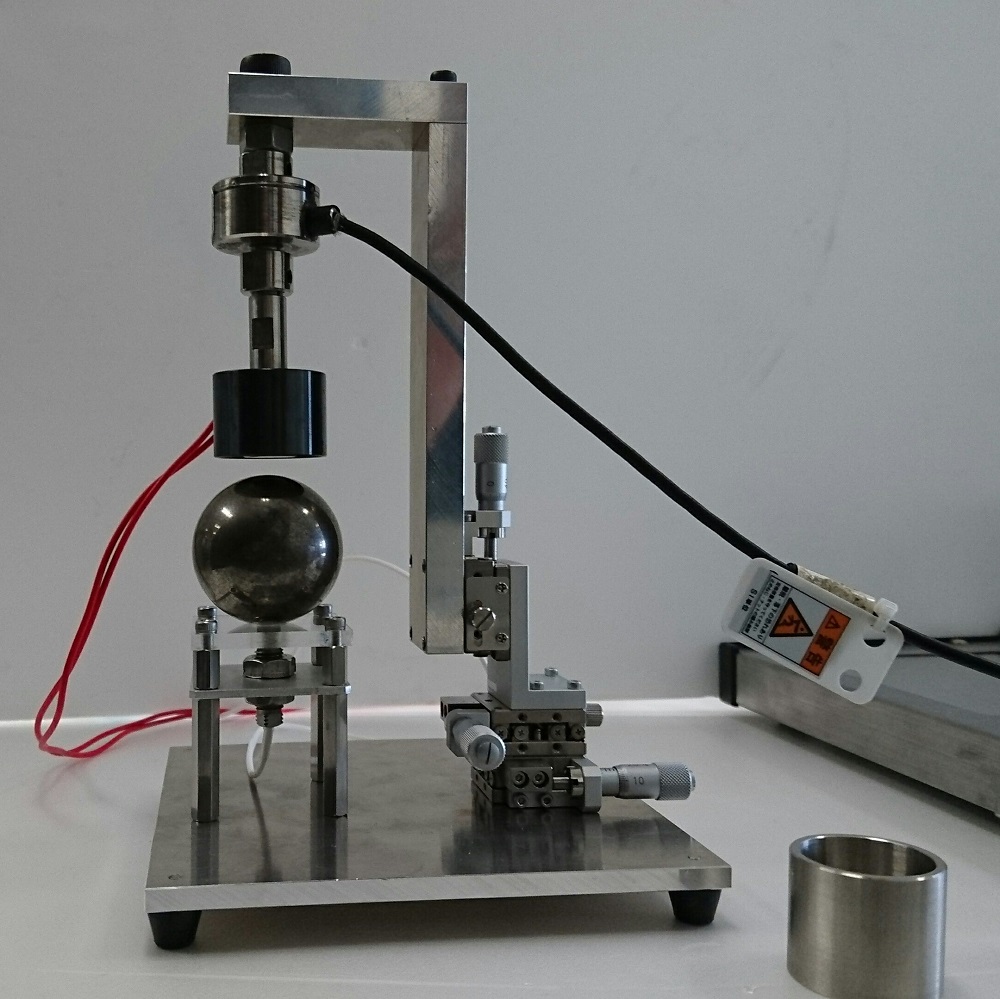
Currently, displacement sensors are generally used to detect rotor position. However, one displacement sensor can only detect one direction. Therefore, in this research, a method to perform the magnetic levitation control of the iron ball by using camera instead of the displacement sensor to detect rotor position is proposed. It is expected to miniaturize the device, because it is possible to detect the position in any direction with only one camera.
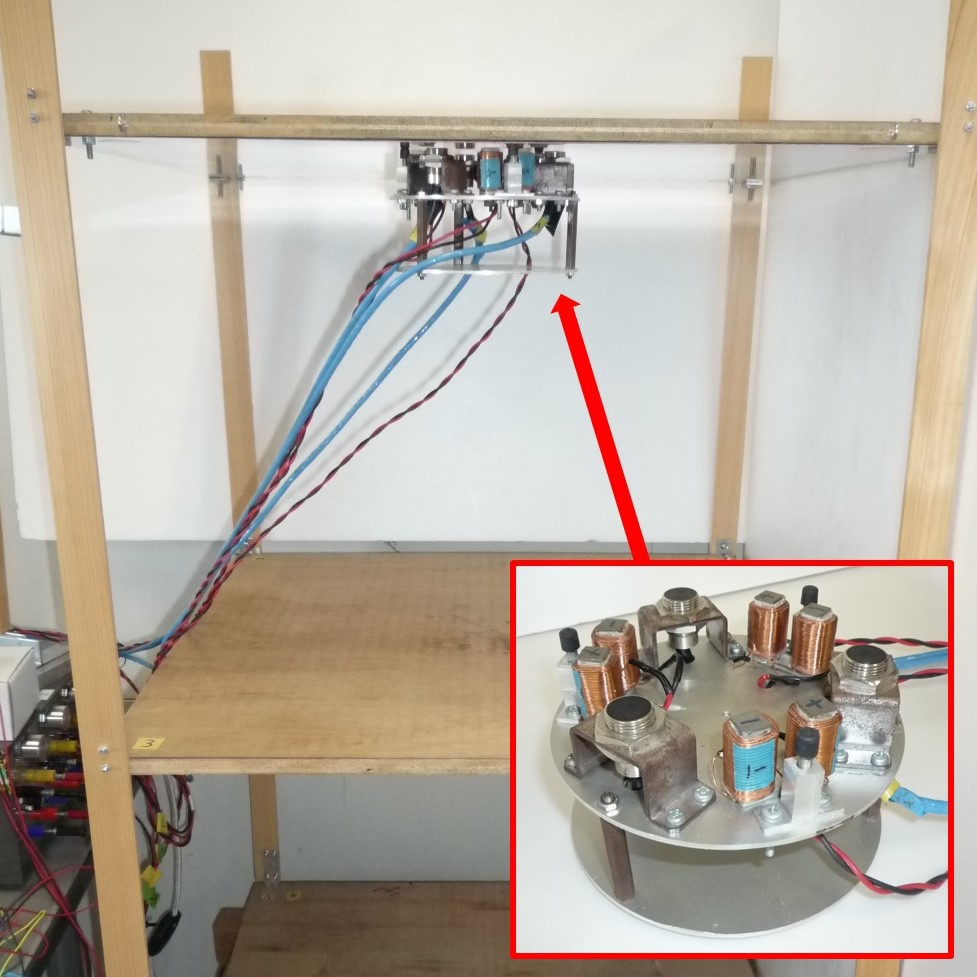
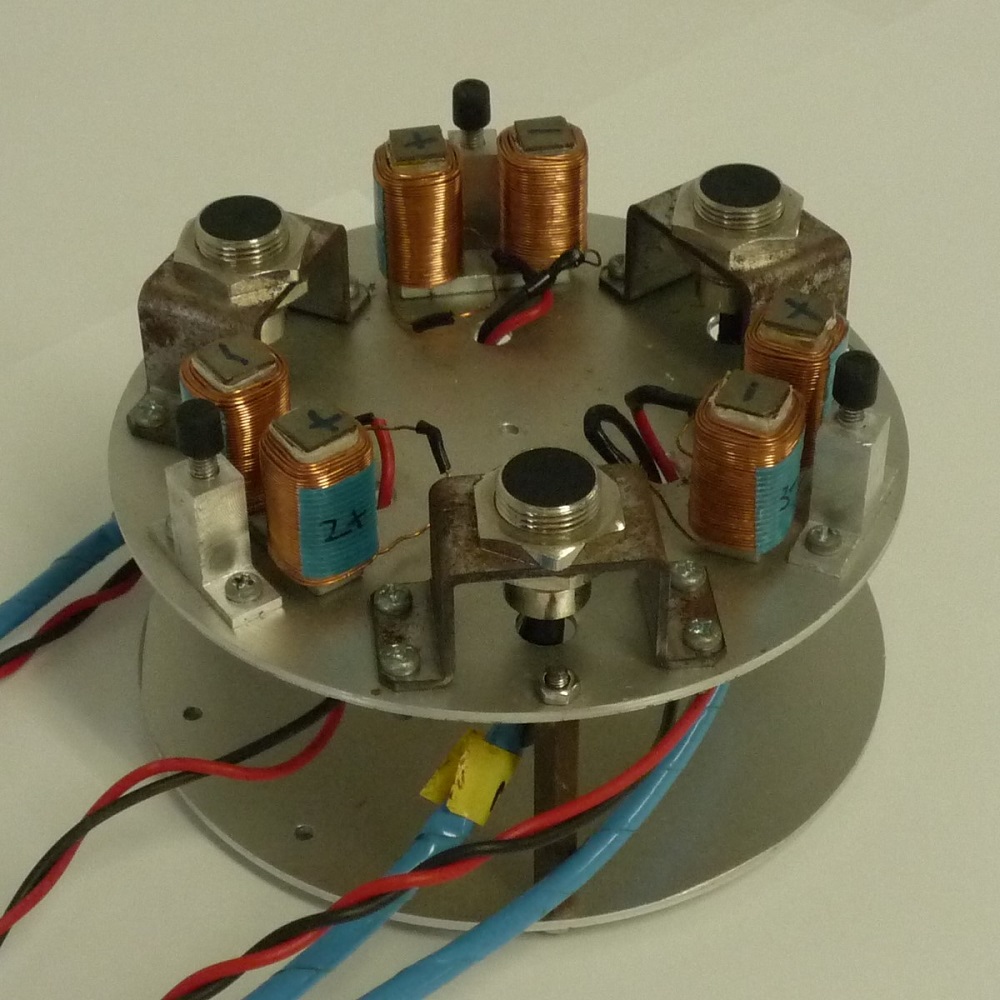
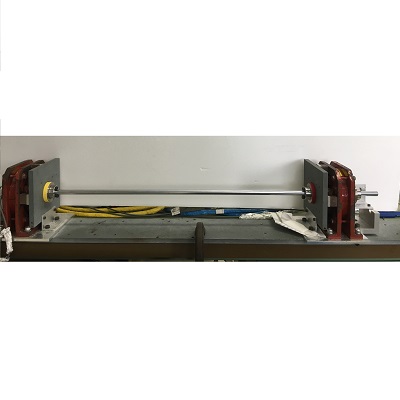
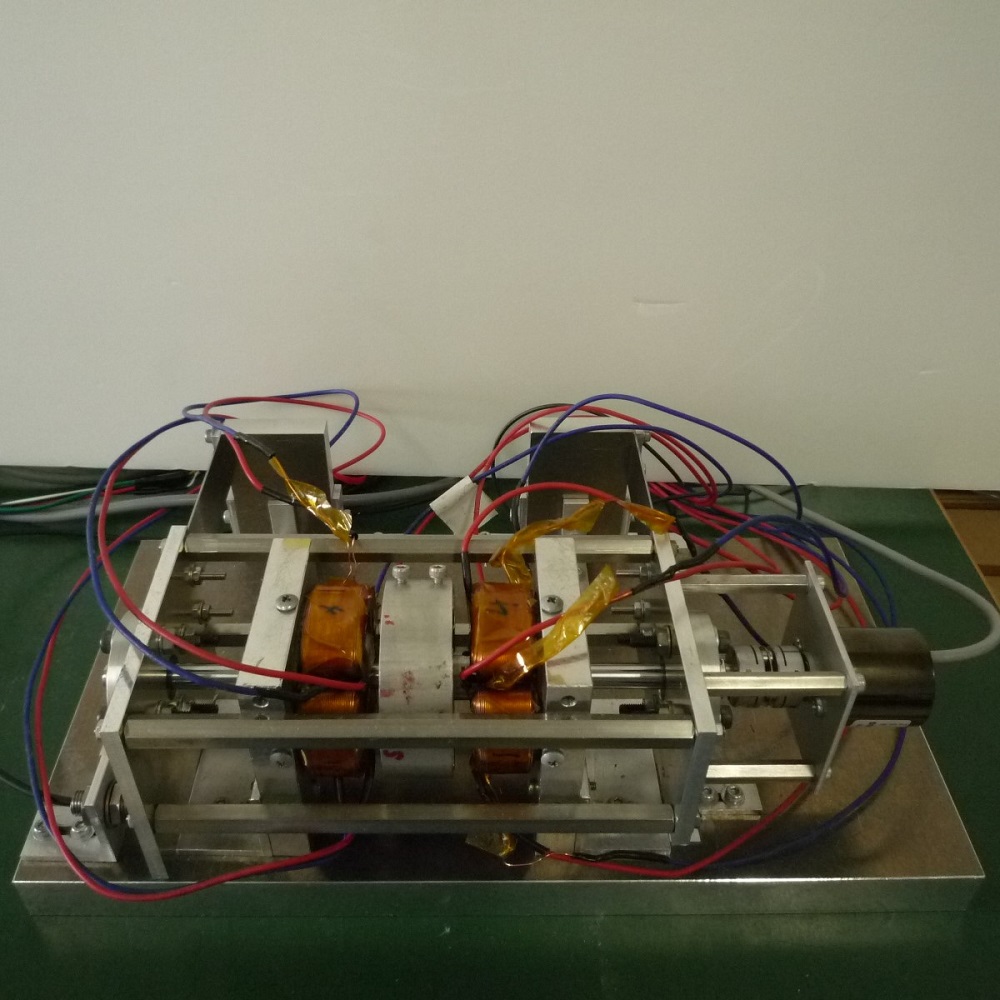
■Levitation/rotation control of six salient pole type magnetic bearings
In this research, the developed equipment consists of two magnetic bearings and one motor installed in between, and it can float and rotate the rotor inserted horizontally to the ground. Generally, 8 Salient-Pole type magnetic bearings are used. For downsizing and reducing the cost, 6 Salient-Pole type ones are employed. By adjusting the diameter and the number of turns of the conductors, enough force is obtained. Also, a control system is constructed to limit the coils used at the same time and to control the current flowing at once and the bearing force.
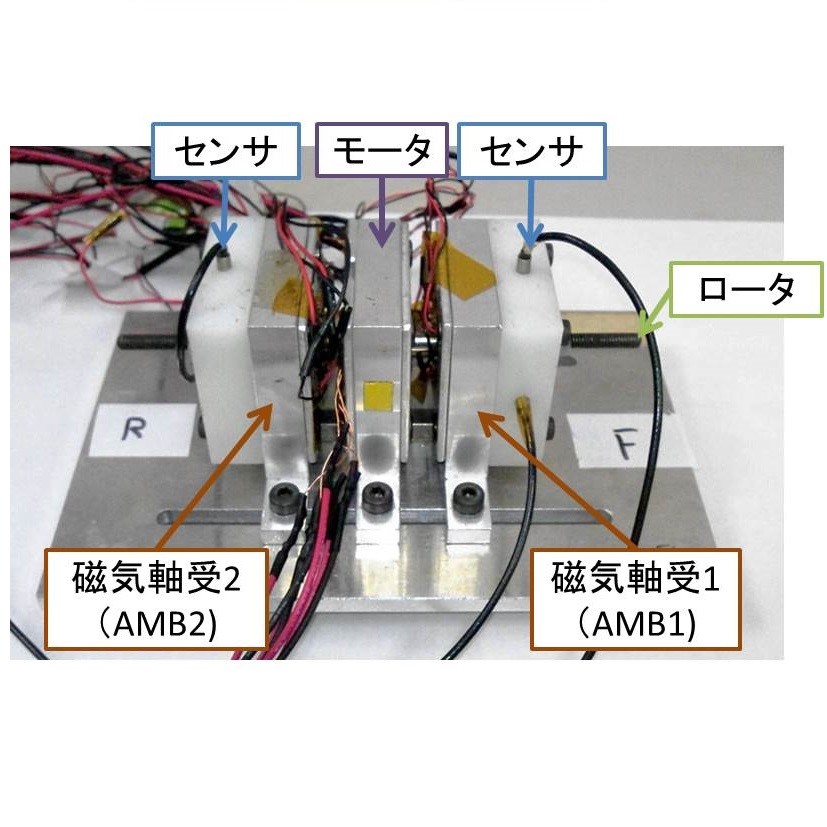
■Levitation control of flexible rotor using hybrid active magnetic bearing
In industrial rotary machines, magnetic bearings are used to achieve high-speed rotation, long axis, and light weight. Because the magnetic bearings are noncontact-supported, there is a merit that there is no loss due to friction / abrasion, however there is a demerit that power consumption is large. In this research, a hybrid magnetic bearing that reduces the power consumption of electromagnets required for control by using permanent magnets is developed. And vibration control is performed when the rotor of the flexible rotor is rotated at a high speed.
■Study of rotation loss in superconducting magnetic bearings
In recent years, liquid helium has been widely used in linear motor cars and the like. There is a possibility of freezing in pumps that transport these low temperature liquids, so it is drawing attention to use superconducting magnetic bearings as a countermeasure to this. However, superconducting magnetic bearings have a problem of rotation loss and an increase in power consumption of the pump. So in this research, the characteristics of the rotation loss caused by the superconductor are studied.
■Evaluation of quick-responsiveness of analog amplifier
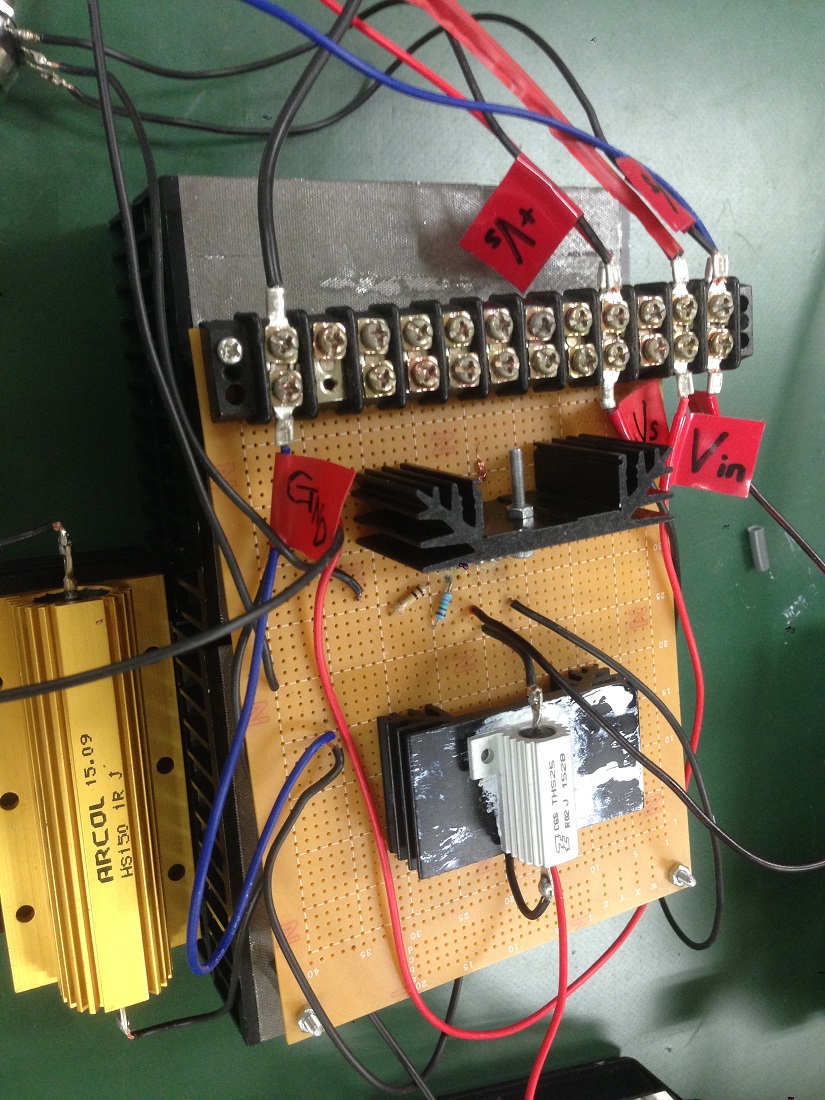
Magnetic force by electromagnet is applied to Magnetic levitation and vibration control. It is essential to provide quick responsive currents over the wide range of input frequency. In this research, an analog amplifier is designed to improve the tracking performance of its output signal according to its input signal and to provide higher responsive current than digital amplifier.
Self-bearing Motor
■Research on suppression of unbalance vibration of Lorentz-Type slotless self-bearing motor
In this research, magnetic bearing which can be applied to high performance small-size motor is considered. And Lorentz-type slotless self-bearing motor which can substitute for the high performance small-size motor is also developed. A magnetic bearing is a bearing that attracts and repels a rotating shaft using the magnetic force of an electromagnet or a permanent magnet and holds the shaft in the air in a non-contact state. The purpose of this research is to develop a self-bearing motor of the same structure as magnetic bearings using Lorentz force of small size and low price.
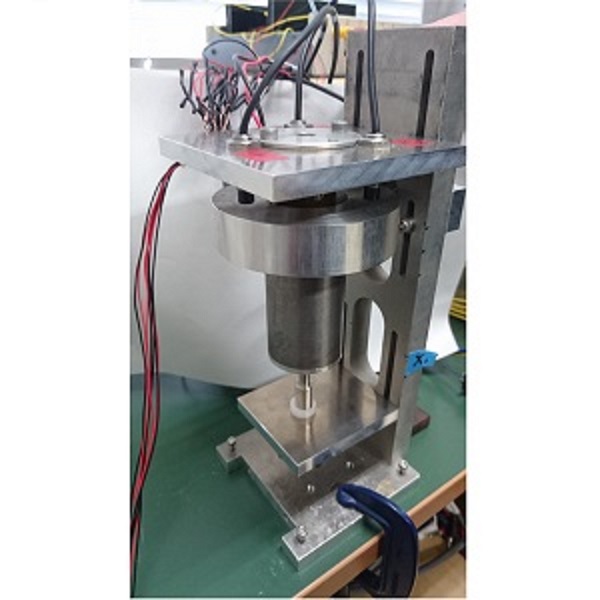
■Development of self-bearing motor with only one side stator

Recently, bearing which is applied in the pump is required for the performance of high-speed rotation. For this reason, magnet bearing is used because of its non-contact support and less friction. However, the whole device including magnet bearing is too large. To solve this problem, in this research, an axial self-bearing motor with only one side stator is developed.
■Axial self-bearing motor using 4 coil concentrated winding stator
In this research, a novel motor which includes two stators with 4 concentrated winding coils and a 4-pole rotor is developed, and its axial position control system is designed. The rotor of the developed motor has four permanent magnets whose phases shifted 45 degrees. For confirming the movement of the motor, the experiment of the control on axial position and rotational speed is done.
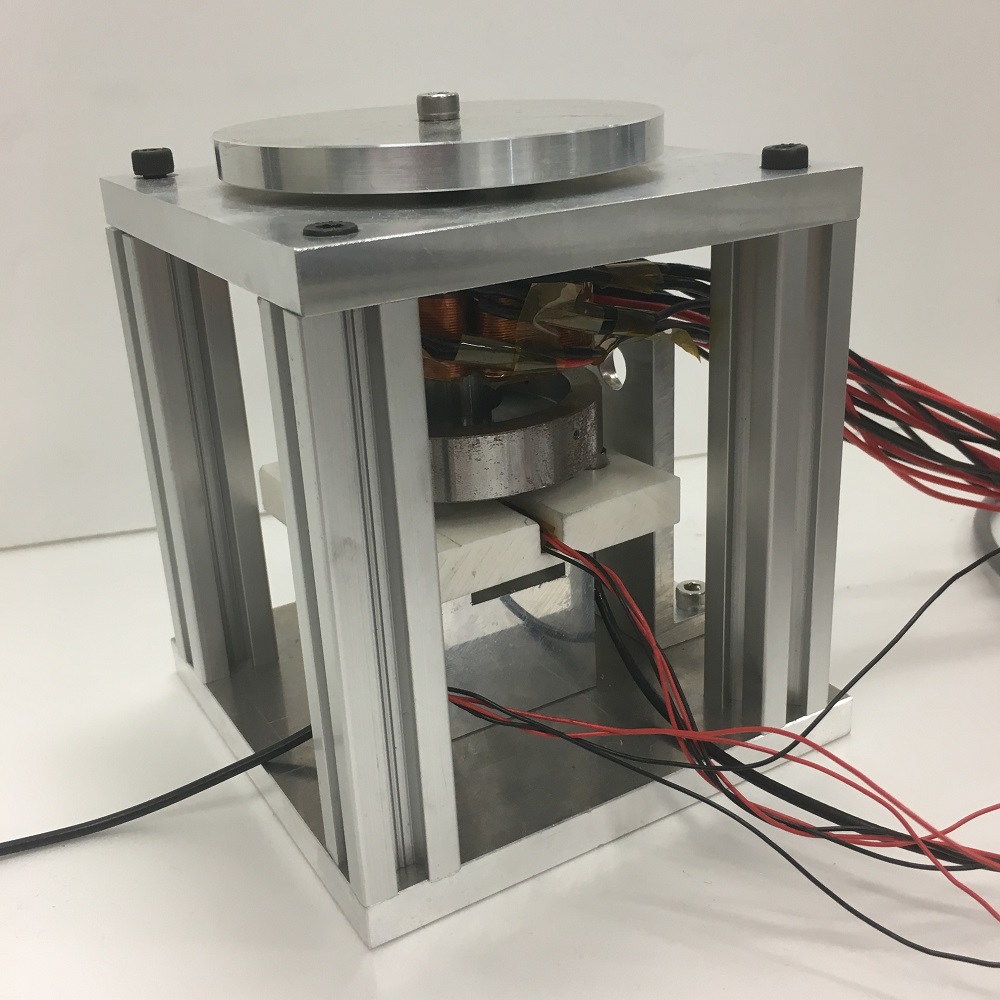
■Research on development and application of 6 salient-pole self-bearing disc motor
Recently, since a magnetic bearing motor has the advantages including no friction loss, no abrasion and unnecessary lubrication oil, the pumps of magnetic bearing type have been widely used and developed. However, to control the magnetic bearing motor needs multi-degree of freedom active control which leads the whole system to become large-sized and expensive. Considering the above problems, a 6 salient-pole self-bearing disc motor is developed and applied into a small-size pump.
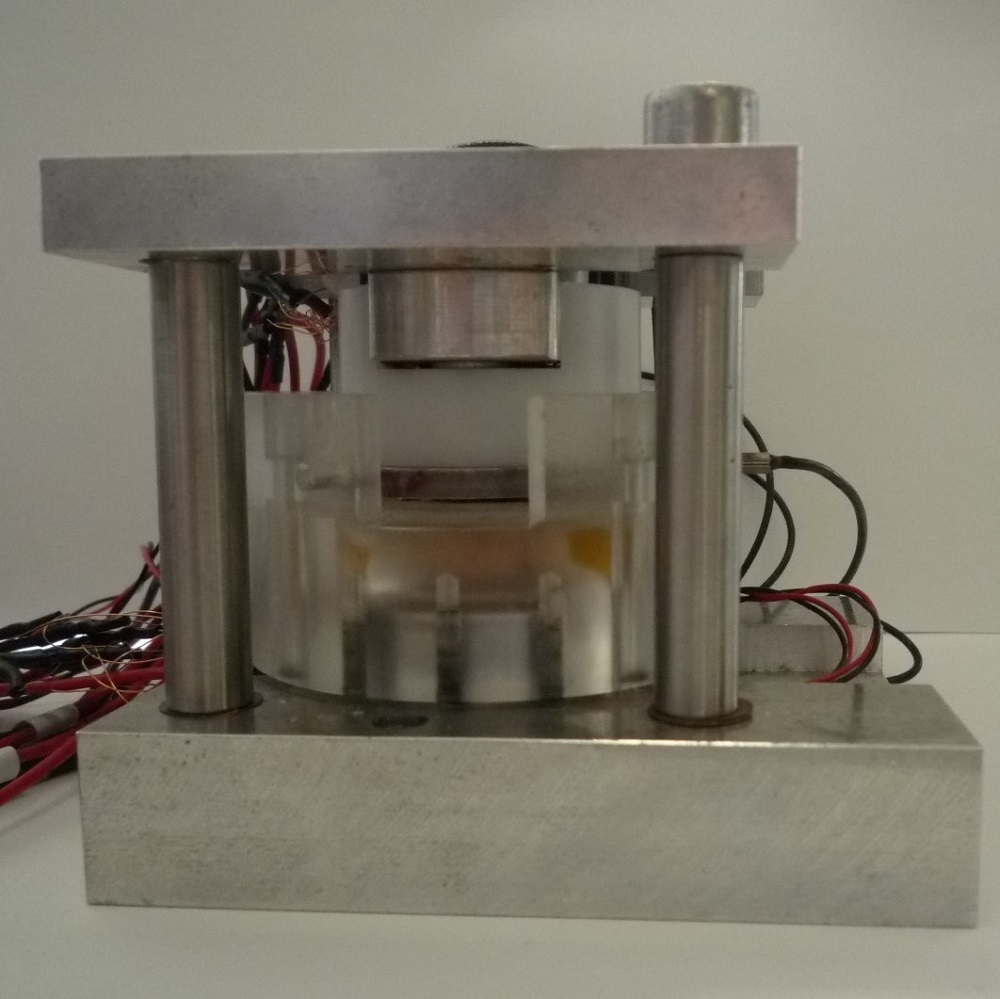
■Research on 3-axis active control disc type self-bearing motor
In recent years, magnetic bearing systems are used in rotating machines under special circumstances. However, as a disadvantage, there is a problem that the device becomes large and expensive due to complication of the device due to mounting of a control mechanism and the like. In this research, an axial self-bearing motor which can simultaneously generate rotational torque and position control is combined with a superconducting magnetic bearing. And a control system is designed for the developed axial self-bearing motor to solving the above problem.
■5-degree of freedom active position control in an axial self-bearing motor
Recently, magnetic bearing attracts for the non-contact support for the body of rotation. It can use permanently without using lubricant because this is no friction. However, since it is vulnerable to vibration, passive magnet is employed in the device and makes the size of device become bigger. In this research, without using passive magnet, a small-size axial self-bearing motor is developed and 5-degree of freedom active position control method is proposed.
■Development of vacuum pump and liquid pump in very-low temperature
Vacuum pump and liquid pump in very-low temperature, a seal material corresponding to the temperature is required, but short-lived. Therefore, in this research, a pump realizing complete non-contact rotation of the impeller with a novel construction using an axial self-bearing motor and a superconducting magnetic bearing is developed. The new type pump is designed based on the structure of old type. And position and rotation control method of axial self-bearing motor is also designed.
Electromagnetic Actuator
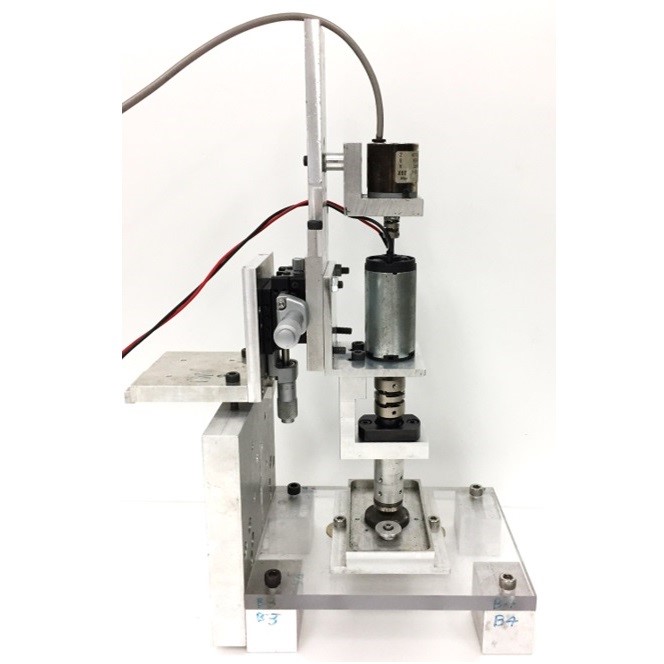
■High Precision and Response Positioning Control by Electromagnet and Flat Spring

Hydraulic servo actuators are widely used in positioning devices, however there are some problems such as upsizing of devices and maintenance of oil. To solve these problems, positioning device using an electromagnetic suction force is developed. Since the electromagnetic suction force is nonlinear, it is difficult to stabilize the system just using electromagnet. In this research, For sovling the difficulty, a new small-size positioning device which need not maintenance is developed based on the mechanism including electromagnet and flat sping is developed.
■Electromagnetic induction type impact actuator
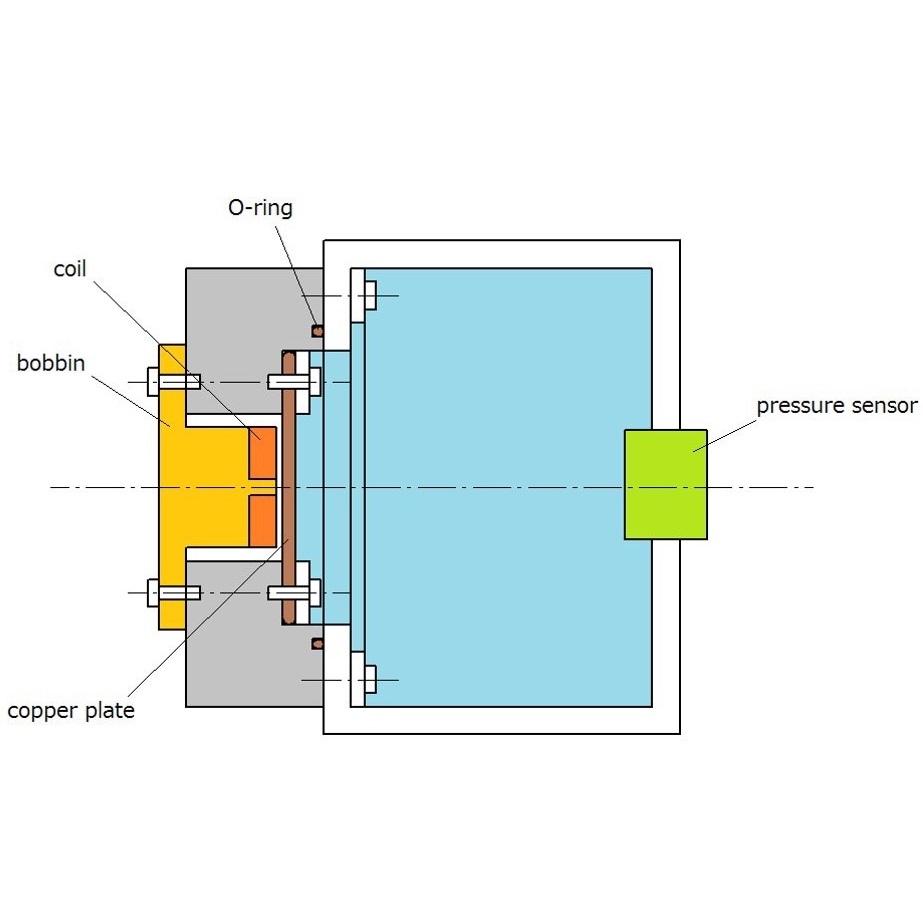
There are diseases that can make gallstones and calculi in the human body. A common treatment method is to generate shock waves to destroy calculi using explosives, underwater discharge, or piezoelectric elements. However, with these methods there is a problem that it is difficult to destroy microscopic objects. Therefore, in this research, a device is developed to product impact force in water by instantaneously making a large current flow in the coil to generate a magnetic field. Since this technology can electrically control the impact force, so it is much safer to destroy gallstones and calculi than shock waves generated by gunpowder or underwater discharge.