3回生の前期からは、いよいよ実践的なロボット実験の授業が始まりました。腕だけのロボットが研究室に雛形として置いてあり、そのプログラムを作成して動かしてみる、という実験です。どのようなプログラムを入力すると、腕がどう動くのか、ということが分かるようになり、ロボット工学がますます面白くなってきました。そして後期からは、製作実習も始まりました。グループで、ロボットを製作するという、本格的なロボット工作の授業です。僕のグループでは、バスケットのフリースローができるロボットを設計しました。しかし、イメージしていたものとは異なり、実際にはピンポン玉を投げる程度のロボットしか出来ませんでした。知識も材料もあまりない中での作業だったので、これを機に、「次はもっといいロボットを作ろう!」と強く思うようになり、それが4回生の研究室選択にもつながるステップになったと思います。
4回生になると、研究室に所属することになります。それまでのロボット工作の勉強をする過程で、ロボットを動かすときには「バランス」というものが非常に重要であるということが分かるようになりました。特に人型ロボットのように、歩いたり、手を動かしたりするロボットは、バランス制御ができていないときちんと動きません。このような理由でただロボットを作るのではなく、バランス制御という分野を研究したいと思い、現在の研究室に入りました。
研究室では、まずロボットコンテストに向けて7月あたりまで、ロボットを作りました。このロボコンは研究室内で開催されるもので、4回生がロボットを製作し、院生や先生が審査をします。僕は機体が浮いた状態を維持できる飛行機ロボットを製作しました。
そして夏休みから、いよいよ卒業研究にむけての準備です。バランスを取る理論を構築し、それが実際にきちんとバランス制御できるのかを、ロボットを作って、検証実験していくという研究を行いました。大学院へ進んでからも、この研究は続けています。
 |
 |
 |
| 飛行機ロボット |
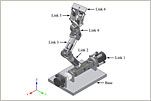
4Link6DOFロボット |
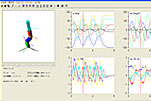
シミュレータ |
|












