相対位置偏差基盤ビジュアルフィードバックによるロボットアームの運動制御
Motion control of robot arm by visual feedback based on relative position deviation
研究概要
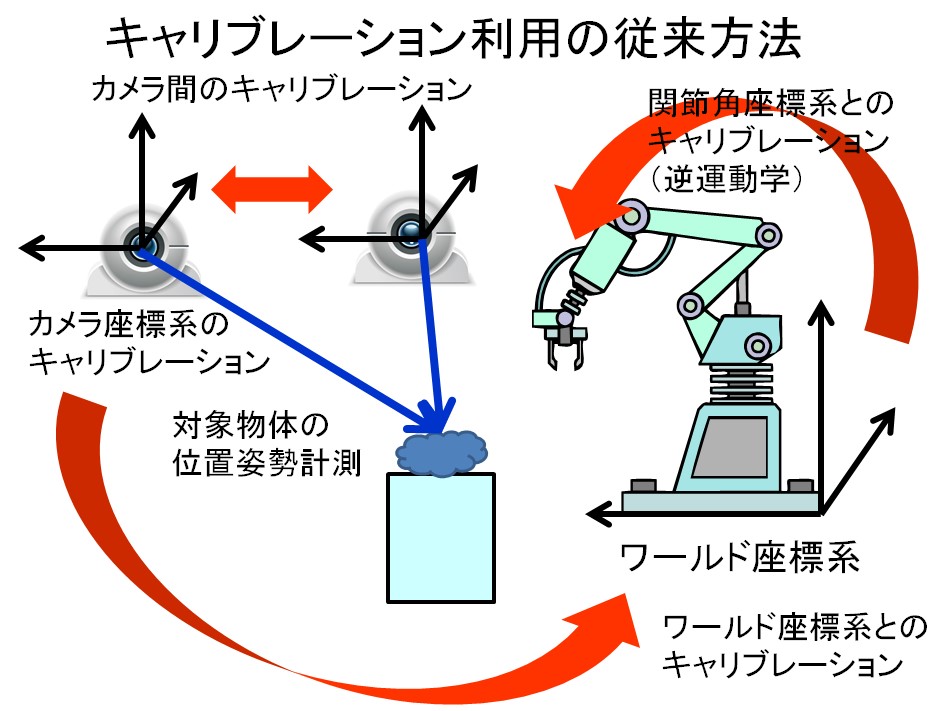
現在のビジュアルフィードバック制御では,カメラとロボットの幾何学的な情報のキャリブレーションが必要となります. このために,多くの作業者の時間が奪われるのみならず高精度な位置制御ができない状況です. 本来,産業用ロボットの繰り返し精度は,数十μm程度を達成しています. しかし,カメラ等を利用するビジュアルフィードバック制御では,キャリブレーションに相当な時間と労力をかけたとしても,0.5mm~1.0mm程度と言われています. これは,従来方は,対象物とロボット手先の絶対位置計測を基盤としていたためです. ロボット手先で実現する作業は,対象物とロボット手先の絶対位置は不要で,相対位置のみ重要な場合が多くあります. 本提案手法は,対象物をロボット手先の相対位置のみを利用するビジュアルフィードバック制御法を開発し,実験的に有効性を確認しています.

特徴
・ステレオカメラの座標系の設定に詳細なキャリブレーションは不要となる
・カメラの内部パラメータ(レンズひずみなど)のキャリブレーションも不要となる
・カメラ数を3台以上に増加することが可能となる
関連資料
- R. Nishida and S. Kawamura,“A New Feedback Robot Control Method based on Position/Image Sensor Integration”Proc. of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), pp.5012-5017, Portugal, 2012
- Akihiro Kawamura, Miyako Tachibana, Soichiro Yamate, Sadao Kawamura, “Encoderless Robot Motion Control Vision Sensor and Back Electromotive Force” Proc. of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2014), pp.1609-1615,Chicago, Illinois, USA, Sep.14-18, 2014
