小型柱状水中採泥ロボットシステム
Compact cylindrical underwater soil-sampling robot system
研究概要
近年,東北沖地震で放射性物質が海底泥へ流れ込んでいることが確認されており,海底の泥を採取の需要が高まっています. しかし,既存の多くの採泥器では,船上から海中へ投下を行い,自重に頼る採泥方法が行われており, 船上から採泥ポイントを間接的でしか狙えない問題や,装置が潮流などの影響を受け流される問題等から,正確な採泥ポイントでの採泥が困難となっています. また,自重に頼っている為に,装置自体が高重量となり採泥調査を行うにあたり多大なコストや時間が必要となります.
この問題に対して,スラスタ推力を利用した採泥ロボットの開発を行なっています. 本採泥ロボットは,水深100[m]以浅での水中環境での採泥を対象とし,正確なポイントでの採泥と一度の潜水にかかる時間とコストの削減を目指しています.
特徴
・スラスタ推力による迅速な採泥を実現するため,以下の事を実施しています
I. ロボット本体の小型・軽量化(時間的分解能を高める)
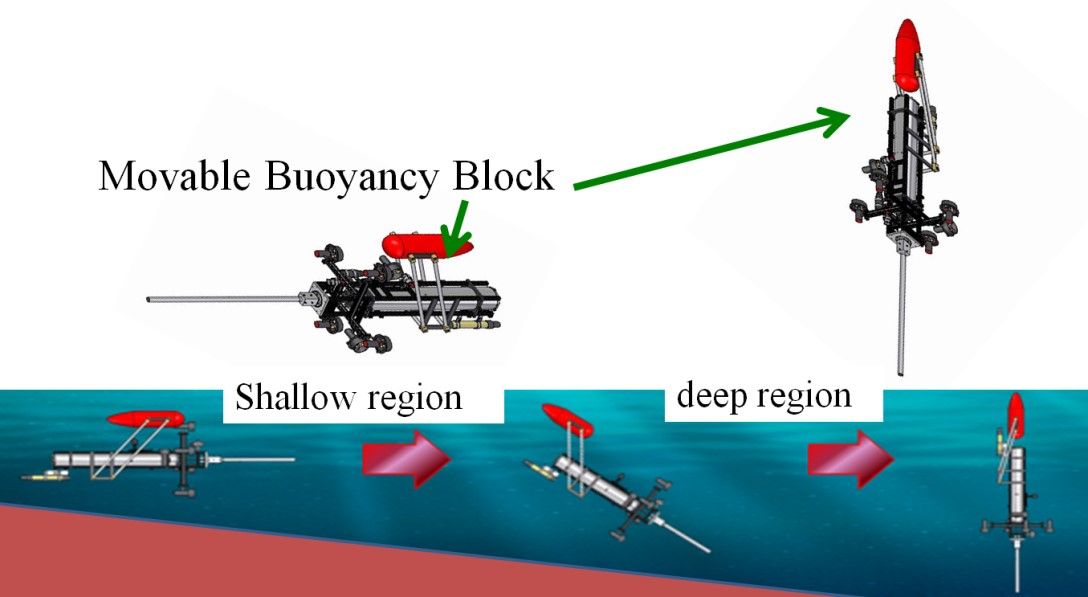
II. 浮力体による中性浮力特性の実現(空間的分解能を高める)
・海底方向と本体水平移動方向に取り付けたカメラによって,海底との接地や周辺の環境の画像取得が可能
・GPS,SSBLなどのセンサを搭載することにより目標位置での正確な採泥が可能
鉛直運動型柱状採泥ロボット

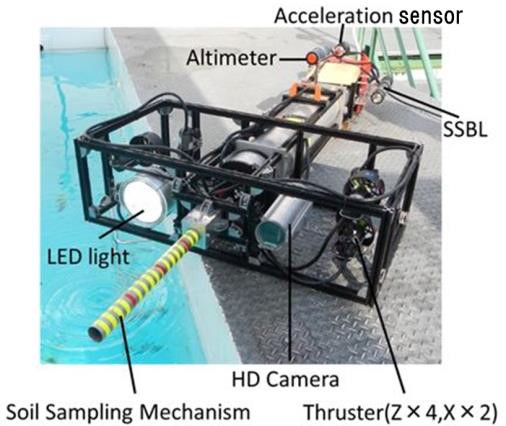
水平運動型柱状採泥ロボット

関連資料
- Kenshirou Yokoi, Michitaka Kawabata, Sonoko Sakai, Sadao Kawamura, Norimitsu Sakagami, Shinji Matsuda, Atsushi Mitsui and Ko Sano, “Improvement of a Human-portable Underwater Robot for Soil Core Sampling” Proc. of the Oceans’14 MTS/IEEE St.John’s, Newfoundland, Canada, Sep.14-19, 2014
- Norimitsu Sakagami, Shinnosuke Sasaki, Michitaka Kawabata, Kenshirou Yokoi, Shinji Matsuda, Atsushi Mitsui, Ko Sano , Kouichi Tago and Sadao Kawamura, “Development of A Human-portable Underwater Robot for Soil Core Sampling” Proc. of the Oceans’13 MTS/IEEE Bergen, Norway, June 10-13, 2013
- 佐々木,河端, 横井,坂上,松田,三井,佐野,田子,川村「スラスタ推力による採泥機能を有する小型水中ロボットの開発―第2 報実験による性能評価―」ロボティクス・メカトロニクス講演会2013,2A2-M04, 2013
- 横井,佐々木,河端, 岡島,中村,大上,坂上,松田,三井,佐野,田子,川村「スラスタ推力による採泥機能を有する小型水中ロボットの開発―第3 浮心移動機構を含むシステム設計―」ロボティクス・メカトロニクス講演会2013,2A2-M03, 2013
- 横井,河端,堺,坂上,川村,建山,横山,松田,三井,佐野,田子「柱状採泥用小型水中ロボットの回転力利用法の検討」第31回日本ロボット学会学術講演会,2O2-06, 2013
