ダム堤体の保守点検用水中ロボット
Underwater robot for maintenance & inspection of dam body
研究概要
ダムは日本全土に3000以上あり,保守点検が急務となっています. 特に,水中側からの提体(コンクリート面)の点検は,ダイバーによって実施されていますが,水深が100mを超えるダムも存在し,人の検査が極めて困難です. そこで,ダムのゲート設備,提体,洪水吐き水叩き部などに対するダイバーの近接目視を代替可能な小型軽量ロボットシステムを開発します. 本水中ロボットは,ダムに機械的接触し20cm~40cm程度の至近距離からステレオカメラにより検査します. ロボット本体の端点を固定した回転運動により,自己位置が幾何学的に算出され,高精度の位置推定が期待できます. 2014年11月に神奈川県の宮ケ瀬ダムにおいて現場検証実験を行いました.

特徴
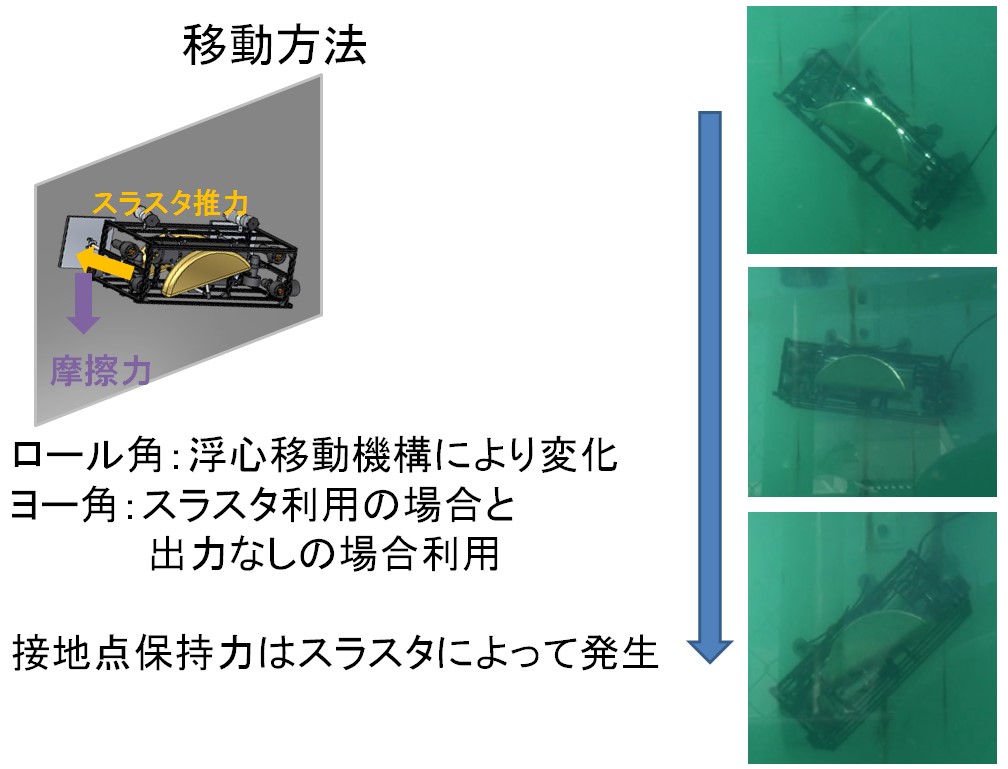
・堤体にロボットが機械的に接触して, カメラからの一定の距離を維持
・ピボット運動と水深から, 幾何学的に画像位置を算出可能