研究内容
Project
本プロジェクトは、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)が中心となり関係省庁・機関が連携して推進する「産業DXのためのデジタルインフラ整備事業/複雑なシステム連携時に安全性及び信頼性を確保する仕組みに関する研究開発/SoS時代のシステムの安全性・信頼性とイノベーションの両立に向けたデジタルインフラ整備及びガバナンスのあり方に係わる研究開発」として実施しています。
Project Background
テクノロジーの発展と共に、ドローンによる配送、自動運転車の導入、AIを搭載したロボットが人々の生活の中に溶け込み、より生活を便利に、豊かにするという未来社会が、目の前に迫りつつあります。
一方で、2021年に東京パラリンピック会場において発生した自動運転システムに関わる事故により、以降の自動運転システムの運行停止を招いてしまいました。それ以降、公共の場でのイノベーションの実装に厳しい目が注がれています。我が国の社会システムにおいては、「安心・安全」に重きをおく社会風土があり、レピュテーションリスクがイノベーションの足かせになっています。ドローンやサービスロボット等、複数の異なるモビリティが同時に運用され、価値が相互に増幅するような仕組みが期待されるSociety 5.0 の実現に向けて、「安心・安全とイノベーションの両立」を図るため、リアルタイムに事故の原因究明と再発防止を図り、迅速に復旧を図ることのできるデジタルインフラの整備及びガバナンスの提言を目指します。
一方で、2021年に東京パラリンピック会場において発生した自動運転システムに関わる事故により、以降の自動運転システムの運行停止を招いてしまいました。それ以降、公共の場でのイノベーションの実装に厳しい目が注がれています。我が国の社会システムにおいては、「安心・安全」に重きをおく社会風土があり、レピュテーションリスクがイノベーションの足かせになっています。ドローンやサービスロボット等、複数の異なるモビリティが同時に運用され、価値が相互に増幅するような仕組みが期待されるSociety 5.0 の実現に向けて、「安心・安全とイノベーションの両立」を図るため、リアルタイムに事故の原因究明と再発防止を図り、迅速に復旧を図ることのできるデジタルインフラの整備及びガバナンスの提言を目指します。

Project Overview
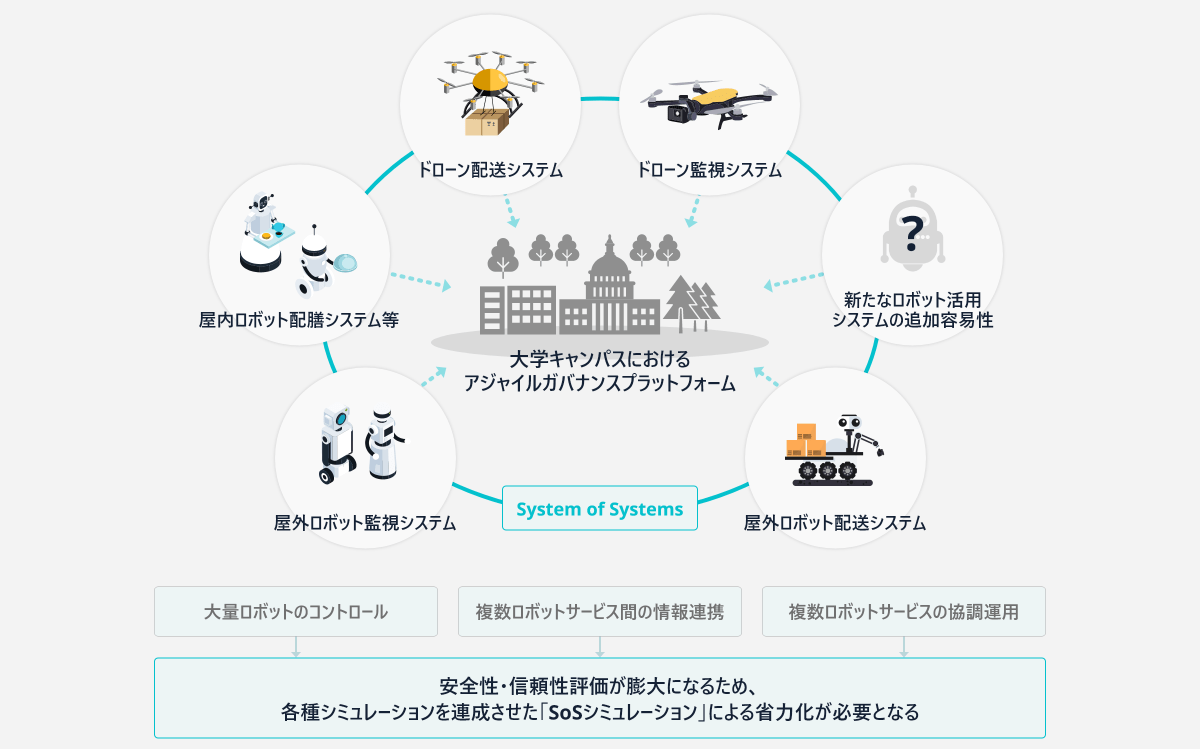
自動制御システムに関する技術が進歩する中で、同一の空間内での複数のシステム群を統合するためのシステム(SoS: System of
Systems)をいかに構築し、社会に受容される形で運用していくかということが求められる時代が到来しています。
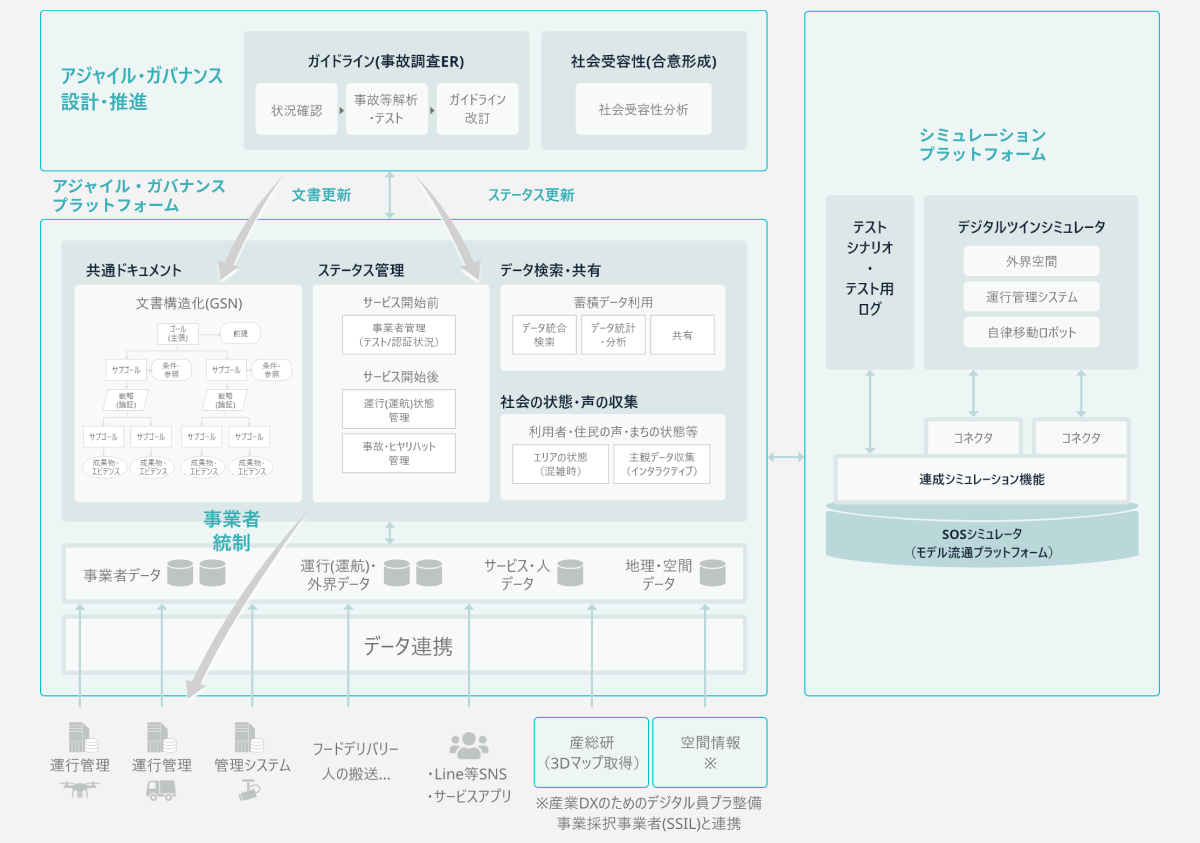
本研究開発の目的は、SoSに関わる事故が生じてもリアルタイムに事故の原因究明と再発防止を図り、迅速に復旧することのできるデジタルインフラ整備及びガバナンスのあり方を提言することです。原因特定に必要なマルチステークホルダー間で共有すべきデータ項目・共有範囲・共有方法及び、共有データ利活用に向けた社会受容性の醸成を図ることのできるデジタルインフラ「アジャイル・ガバナンスプラットフォーム」の要件を明らかにします。同時に、リアルタイム性を高めるための社会システム(ソフトロー)の導入と、高度に自動化された社会システム(機械的な判定技術)の構築を立命館大学の大阪いばらきキャンパスをリビングラボとして活用し実証的に論じます。
本実証に向けて、2 つの事業項目(①②)の研究開発を目指します。
本研究開発の目的は、SoSに関わる事故が生じてもリアルタイムに事故の原因究明と再発防止を図り、迅速に復旧することのできるデジタルインフラ整備及びガバナンスのあり方を提言することです。原因特定に必要なマルチステークホルダー間で共有すべきデータ項目・共有範囲・共有方法及び、共有データ利活用に向けた社会受容性の醸成を図ることのできるデジタルインフラ「アジャイル・ガバナンスプラットフォーム」の要件を明らかにします。同時に、リアルタイム性を高めるための社会システム(ソフトロー)の導入と、高度に自動化された社会システム(機械的な判定技術)の構築を立命館大学の大阪いばらきキャンパスをリビングラボとして活用し実証的に論じます。
本実証に向けて、2 つの事業項目(①②)の研究開発を目指します。
事業項目
- ① SoS 運用データの収集・管理・共有及び社会受容性に配慮した横断的な 「アジャイル・ガバナンスプラットフォーム」
- ①−A :「アジャイル・ガバナンスプラットフォーム」
- ①−B:SoS 運用「ガイドライン」
- ①−C:社会受容性を醸成する「デジタル共創技術」
- ② SoS の安全性・信頼性評価の省力化を実現する横断的な「シミュレーションプラットフォーム」
Project.1 SoS 運用データの収集・管理・共有及び社会受容性に配慮した横断的な「アジャイル・ガバナンスプラットフォーム」

目的
自律移動ロボットの大量、高密度、高頻度な運行に備えたデジタルインフラの実現に向けて社会受容性の要件を具体的なプラットフォームとして設計し、実装・運用することで実証的に検証します。
概要
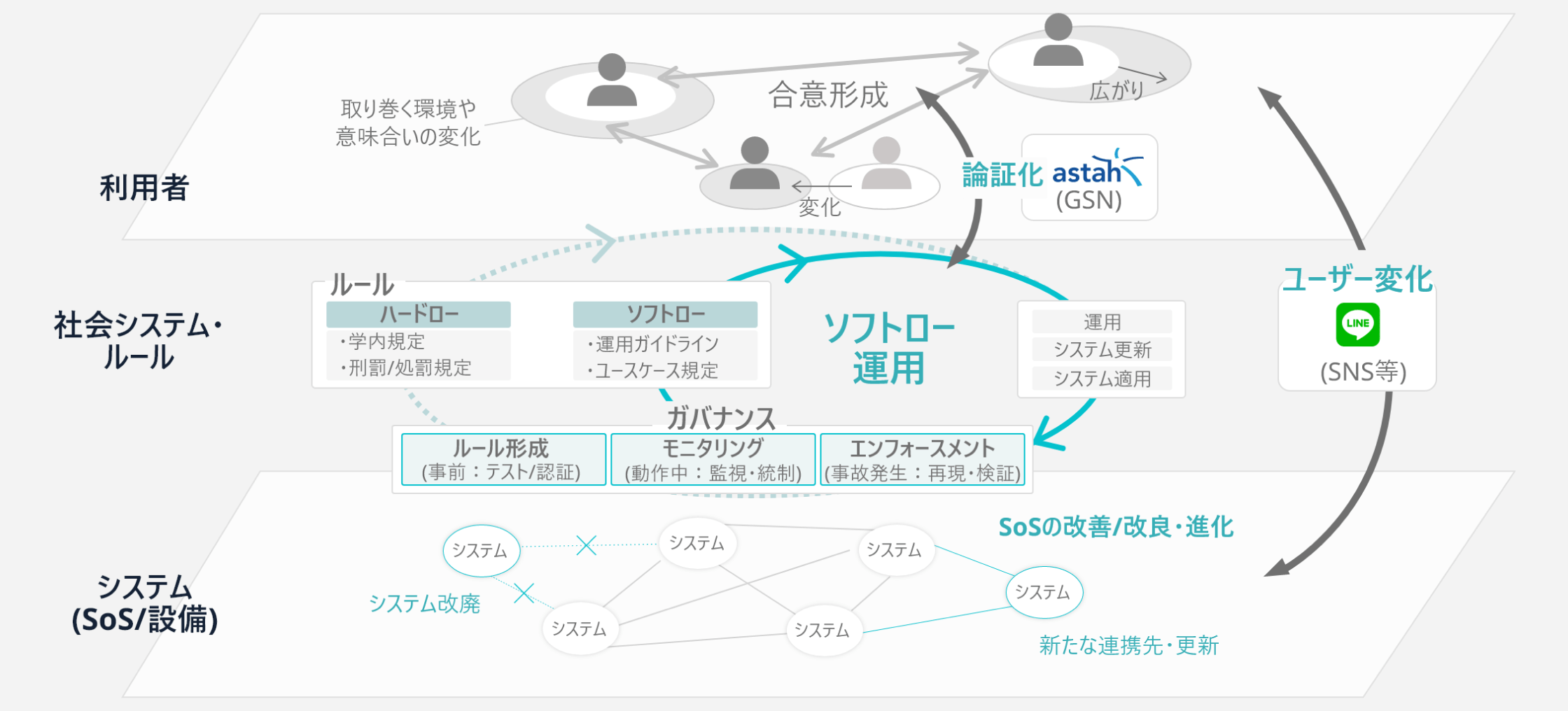
検証の方向性としては、A システム面の整備、B ガバナンス面の整備、C 社会受容性の確保/向上の仕組みの整備の3 つの実現に向けた主題として、データ連携基盤の実装と検証を実施します。
A
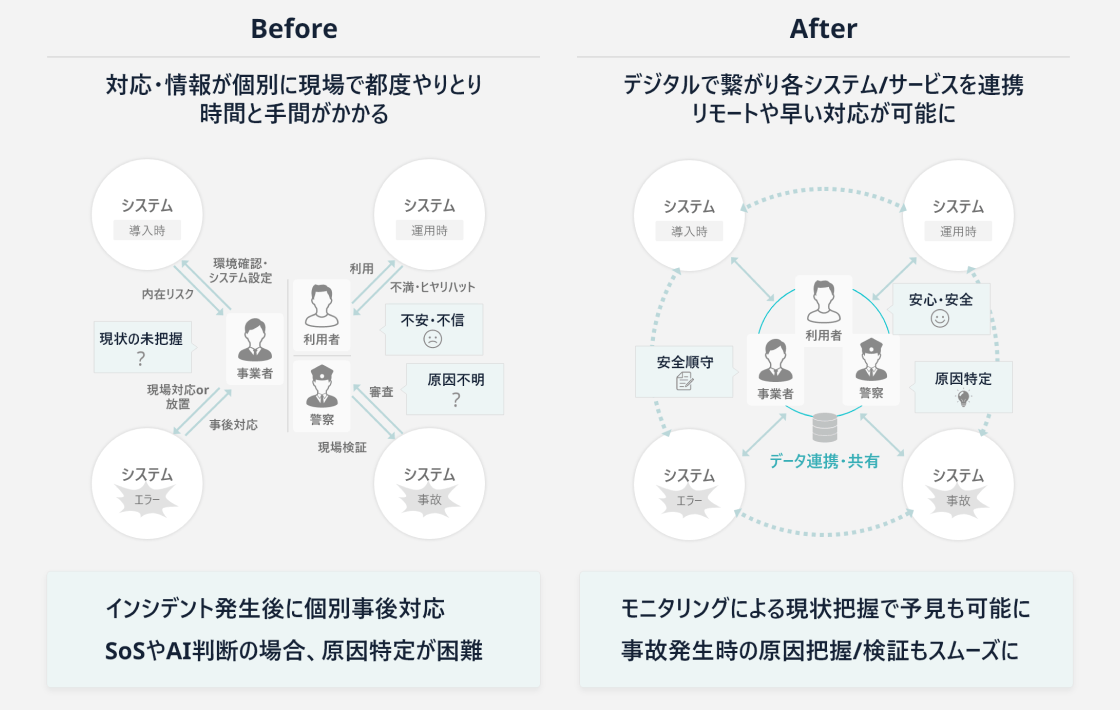
A.システム(データ利活用)の観点では、デジタルで各システムがつながることによる個々の対応の最適化のメリットを具体化します。
B
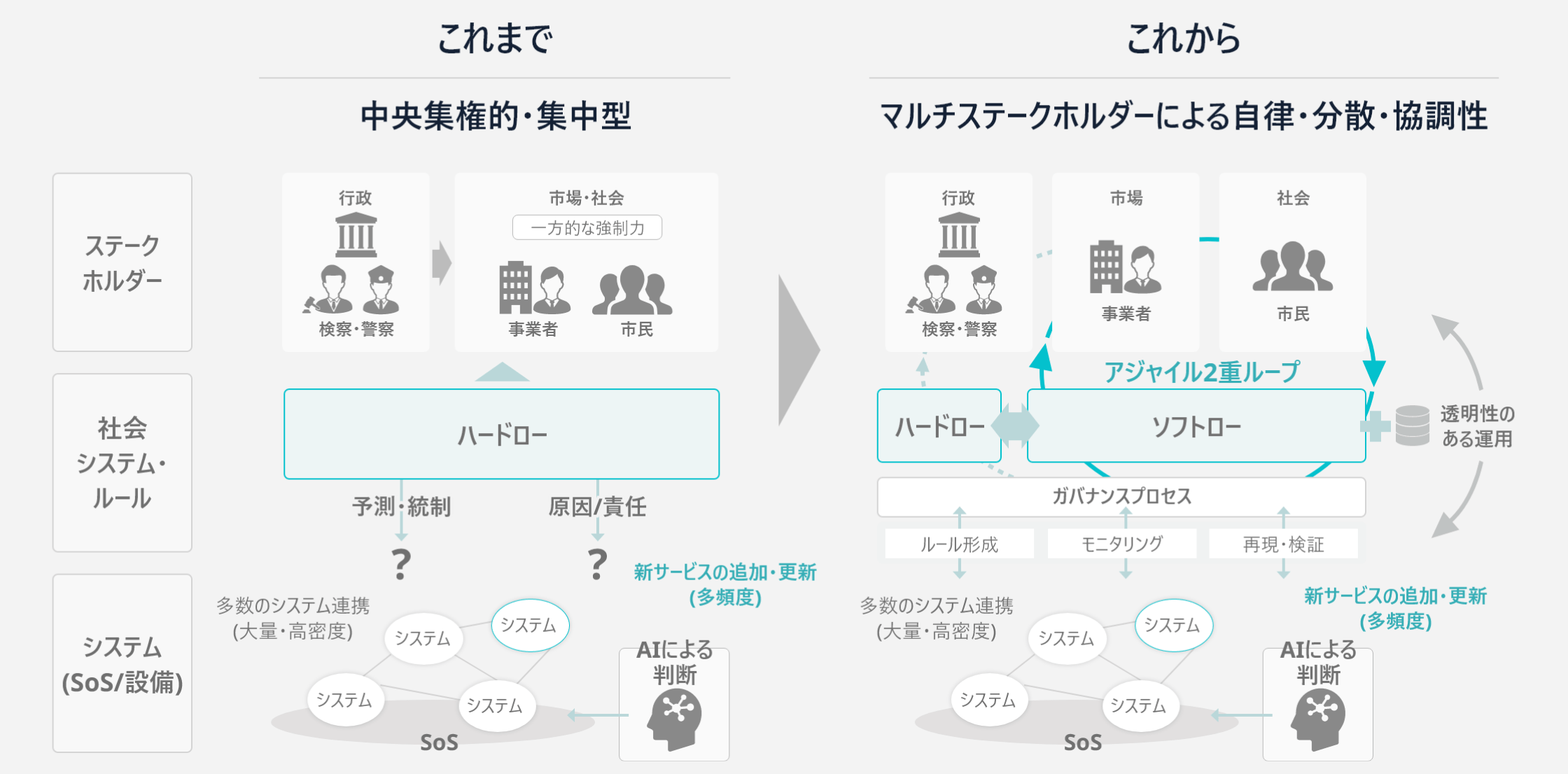
B.ガバナンス(社会システム)の観点では、自律移動ロボットに関わる様々なシステムが複雑に相互接続する場合、これまでのような個別的かつ固定的な管理・運用ではなく、システムの多様性や変化に柔軟に対応した管理・運用方法が必要となります。
C
C.社会受容性の確保/向上の観点では、社会の多様化に伴い、システム/サービスを利用し評価する人々の価値観や環境の多様化に合わせてSoS を進化/発展させるような運用が必要となります。
Project.2 SoSの安全性・信頼性評価の省力化を実現する横断的な「シミュレーションプラットフォーム」
目的
大量の自律移動ロボットが高密度で運用されるような社会を想定した場合、ビル風等の発生の考慮や、高密度に運行する際の相互影響を判断に組み込むなど、リアルな物理世界に関する詳細な検討が必要になるため、安全性の評価や再発防止策の妥当性の評価が、即時に行われる必要があります。とりわけロボットやドローンの実機を使った試験や評価は、コスト面や試験実施における安全性確保等の面から実施対象範囲が限定されます。そのため、仮想環境を用いたシミュレーションによる試験や評価による自動化の仕組みを確立することを目指すことを目的とします。
概要
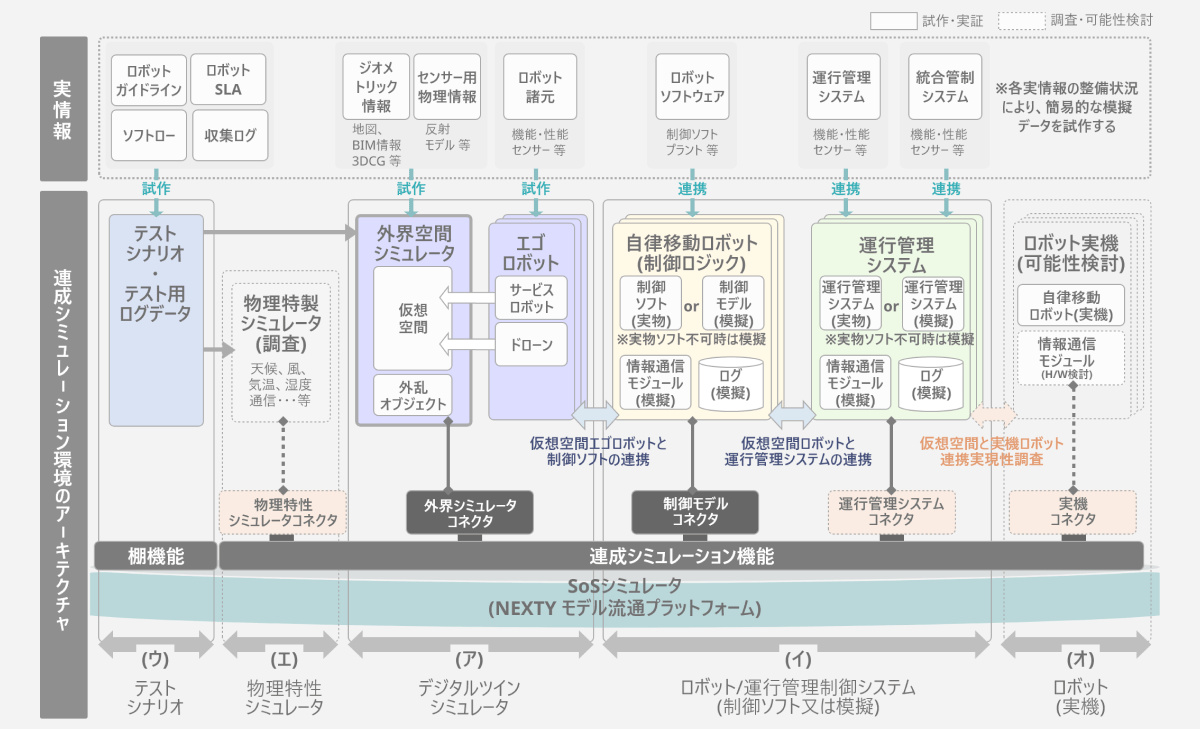
本研究では大学キャンパスにおけるルールに適応した安全性や信頼性の確保を加味し、複数のロボットや異なる管制システムのシミュレータを連成させた、横断型のシステム連成シミュレーション技術の試作と実証を行います。
内容
SoS を実現するシミュレータについての研究開発は大きく2つあります。
①「異種のロボットが協調運用されるSoS をシミュレーションする環境(SoS シミュレータ)」の整備
②「SoS の安全性及び信頼性を自動評価する手法」の導出
シミュレーション環境の試作整備を図り、リアルな環境では再現できないことの迅速化と共に自動化による省力化を導きます。
①「異種のロボットが協調運用されるSoS をシミュレーションする環境(SoS シミュレータ)」の整備
②「SoS の安全性及び信頼性を自動評価する手法」の導出
シミュレーション環境の試作整備を図り、リアルな環境では再現できないことの迅速化と共に自動化による省力化を導きます。