



![]()
![]()
![]()
ヒューマノイドロボット
高性能ヒューマノイドロボットの開発
特設ページ準備中
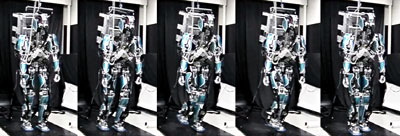
- 等身大油圧駆動ヒューマノイドロボットの開発
- トルク制御と最適接触力制御
- 不整地歩行、転倒回避制御
- 剛性適応とダイナミクス学習による高速全身運動制御、見真似学習等

油圧駆動2足歩行型ヒューマノイドロボット(2014年冬季型)

双腕ロボット(IREX2013型) 開発環境(国産技術)
過去の実績
詳しくは特設ページをご覧ください。

実時間追従歩行 (早大・高西淳夫教授,山口仁一博士との共同研究, 2007)

不整地バランス制御
準動歩行

全身運動のダイレクトティーチング

ボールを眼で見て打つ! (ATR・川人光男博士らとの共同研究、2008)


- 最適空中姿勢制御 (東工大・美多勉先生との共同研究)
- 出力零化による床反力制御および運動量制御(姿勢制御)
- 4リンクロボットによるバク転運動の実現 (東北大・江村超先生との共同研究)
ムービー
バク転制御
油圧モーションコントロール
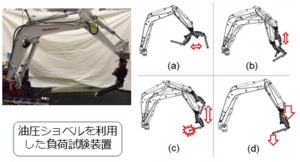
油圧ショベルのロボット化
特設ページ準備中
- 油圧ショベルの力制御による作業高度化
- ロボット用高性能負荷試験装置としての応用研究

産業用油圧機器の高度化
特設ページ準備中
- 油圧ハイブリッド駆動による高効率化
- エアハイドロブースターのサーボ化
- 最適制御による精密な位置決め・荷重制御
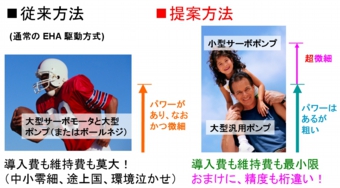
増圧式油圧ハイブリッドサーボ技術の簡単な説明

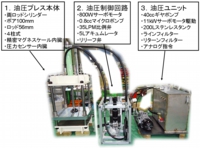
増圧式油圧サーボプレス;小型プレスと10トンプレス(JST A-Stepの成果)


エアハイドロサーボ技術とプレスへの応用(モリ工業共同研究)
次世代フィールドロボット
不整地作業移動ロボットの開発
- 力制御による不整地バランス制御
- 全身運動による作業の最適化
- 力制御による作業員への補助動作
- 不整地高速移動


油圧駆動4脚ロボットA1(IREX2013型)と新型R1(2014年度私大戦略)
高速脚移動機構の開発
詳しくは 旧ページ をご覧ください。
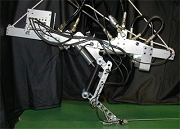
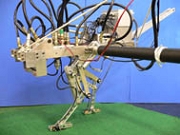
Kenken KenkenⅡR
- バイオメカニクスに基づく機構設計 (2関節筋の利用)
- 高速走行や跳躍等、高負荷高速な運動制御実験による検証
- 作業ロボットの移動機構としての応用
- 柔軟な全身力制御による不整地歩行
ムービー
スイングテスト / 高速走行 2.0[m/s] /両足ジャンプ (3分の1の出力)
2足走歩行制御理論
ハミルトン力学系と周期運動制御に基づく制御アルゴリズム
特設ページ準備中
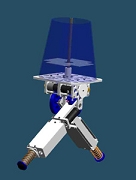
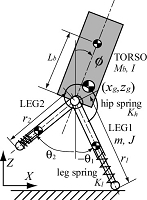
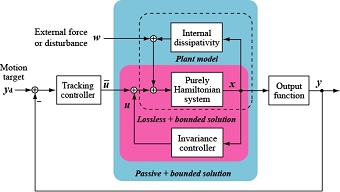
- バネを利用した受動(ゼロ入力)走行および歩行
- 時間可逆対称性と受動性による大域的な歩容生成
- バネ剛性適応制御によるエネルギー最小化制御
- 対称軌道の摂動計算と安定性解析
- 対称性を利用した繰り返し学習制御 (藤本健治 準教授, 佐藤訓 博士との共同研究)
ムービー
シミュレーション / 歩行実験 / 走行実験
受動走行ロボットの歩容解析と最適制御
詳しくは 旧ページ をご覧ください。
- バネ剛性適応制御による受動(零入力)走行
- 時間可逆対称性による安定化制御
- 対称性を利用した学習制御(藤本、佐藤氏との共同研究)
- 対称軌道の数値解析 (上田哲史氏との共同研究)

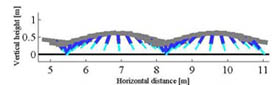
ムービー
高速走行の数値シミュレーション(5 m/s)
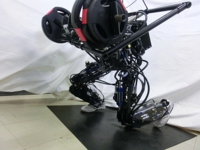
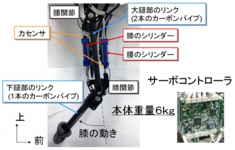
歩行アシストロボット
トルク制御可能な外骨格ロボットの開発と制御
特設ページ準備中
- 運動負担を軽減する最適アシスト制御
- 運動学習に基づくリハビリプログラム
- ヒューマノイド制御を援用した自律歩行・姿勢制御
- 筋電等の生体信号を用いた最適運動推定
- 動特性・出力の異なるアクチュエータのハイブリッド駆動
- 軽量ハードウェアの開発

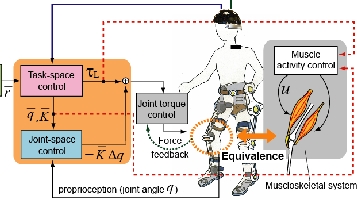
トルク制御可能な自律型空電ハイブリッド外骨格ロボットXoR2(ATRとの共同研究)
Robots for education
Robots for education
Fishing robot (Tohoku Univ. 2002-2004)
Can press (2010)
(順次動画アップロード予定)
