
社会が求めるものを創り出すプロセスから導かれた金言
- データベースの活用と図書館の「ぶらぶら歩き」
- 「答えがない問題」に取り組む準備
- 結論に至る思考のプロセスを大切にすること
こうした姿勢で得られた情報の結合が創造性につながり、
新たなイノベーションへとつながる。
理工学部教授
下ノ村 和弘
連載企画 第8回
「図書館の使い方がうまいヒト」
社会ニーズに応える新たなロボットの開発をどのように進めているのか。
今回は理工学部教授・下ノ村和弘先生に、先生の研究内容と研究を進めていく中で必要となる情報の集め方や、情報を探す際の図書館の有効な利用方法などについてお聞きしました。
下ノ村先生の研究分野と研究対象
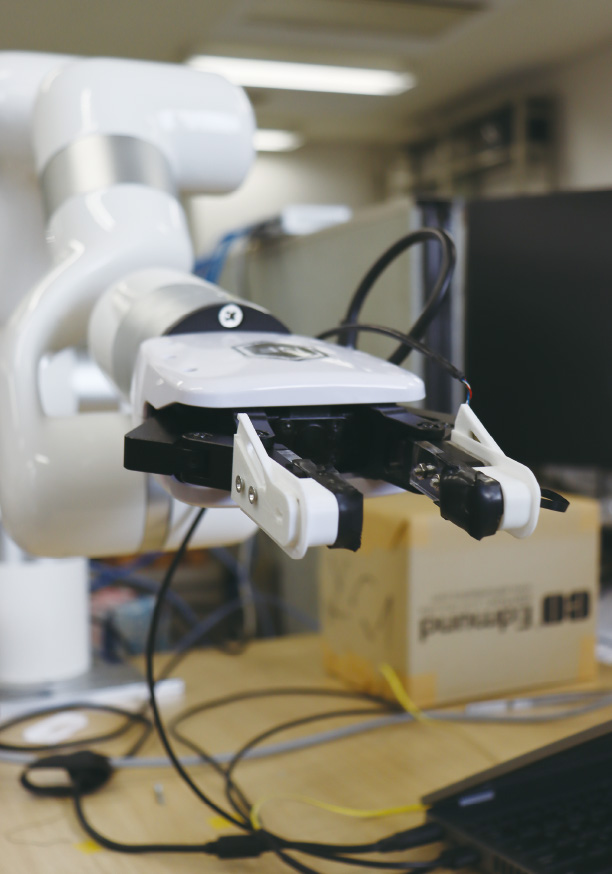
私は、理工学部のロボティクス学科に所属していますので、広く言えばロボット工学が専門となります。ただ、ロボット工学の中にも様々な要素がありまして、私が集中して取り組んでいる分野は、ロボットのセンシング技術になります。具体的にはロボットの視覚や触覚となるセンサーです。
ロボットが動くためには外部の情報を取り込む必要があります。何の目的のロボットかによって、センサーの種類やセンサーを取り付ける位置、計測範囲を変える必要があり、適切なセンサーを選択したり、必要に応じて新しいセンサーを開発したりしています。ロボットのためのセンシング技術が私の主な研究対象です。また、開発したセンサーを、ドローンのような移動ロボットやマニピュレータに応用する研究にも取り組んでいます。
具体的な研究内容
私の研究は視覚センサーからスタートしたのですが、視覚センサーの場合、カメラが入力デバイスとなります。カメラ自体は身近なもので、スマートフォンに使用されているような一般的なカメラも使用するのですが、単に画像を撮影しただけでは画像データがあるだけで、ロボットが目的の仕事をするために必要な情報を知ることはできません。撮影した画像から必要な情報を抽出しデジタル情報としてロボットに提供できるようにすることが重要です。ロボットの目的の仕事によって必要な情報は異なりますので、それに応じた特殊なカメラ、例えば、距離が測れるカメラやサーモカメラのような不可視光を撮影するカメラ、速い現象をとらえる超高速カメラなどを使うこともあります。
そして、ロボットが何か作業をするときはたいていの場合、何かしらのものに触れることになります。この際に触覚センサーが必要となります。例えば、ネジを締める作業をロボットにさせる場合、ネジの向きや持つ位置を正しく認識しなければ締めることができません。正しく掴むために必要なのが触覚センサーとなります。触覚情報を取り込むセンサーの原理は色々なものがあり、例えば、薄い板状の配線が曲がることによる電気抵抗の変化をとらえる方法などがありますが、私が取り組んでいるのはカメラによる画像データをもとにした触覚センサーの研究・開発です。一般的ではないのですが、私が視覚センサーを中心に取り組んできたこともあり、画像により接触した物の位置や形の変化を読み取りそれをロボットの制御に応用する研究を進めています。

下ノ村先生
先生の研究の進め方
私の研究の多くはニーズからスタートします。企業の方から相談いただく中でニーズが明らかとなることもありますし、自身で今問題となっていることなどを調べて今後求められるであろうことを考えたときに潜在的なニーズを思いつくこともあります。ここにこういうロボットがあると便利なのではないか、ということがスタートになっています。そのロボットが、どのような外部情報を受け取ればロボット自体で判断して動いてくれるのか、を考えていく中で、どこにどのようなセンサーが必要になってくるかが明らかになってくるので、それらのセンサーから必要な情報を取り出すために色々とすり合わせていくことになります。最終的に必要な情報が取得できるものを作っていくのですが、理論的に考えて進められる部分もあれば試行錯誤的に進めていくところもあります。
研究を進める中でのニーズがどこにあるかのヒントや、ニーズを実現するための技術情報などは、図書館のリソースを使っています。ニーズ自体の掘り起こしの際も、また解決策を考える際も、自分で考えるための材料として『入力』は、非常に大事にしています。『入力』のためには、様々な人から話を聞いたり、多くの資料や論文が材料となるわけですが、論文や資料を探す際には図書館のリソースを積極的に活用しています。立命館大学ではデータベースが充実していますので、図書館に出向かずとも自身のオフィスで論文などの資料から情報が得られるのは非常に便利です。
研究以外での図書館の利用法
論文のデータベース以外でも、日経雑誌のデータベース、日経BPはよく利用しています。日経の専門誌などが電子版で見られるのは非常に重宝しています。中でも「Nikkei robotics」はよく記事を読んでいます。日経の雑誌は、最新技術の解説的な記事も多くて、現在の動向やトレンド、今後の予測といったことを考える参考になります。論文とは違った観点から有益な情報を提供してくれます。
最近は忙しくてあまり図書館などに行けてないのですが、もともと図書館や本を読むことは割と好きで、時間があるときは特に目的の本などを決めずに図書館に行って、ぶらぶらとしながら面白そうな本を探すということが好きでやっています。本屋とかもそうですが、文庫本のコーナーなどは出版社ごとには分けられて色々なジャンルの本が混ざり合って並んでいますので、背表紙のタイトルを眺めて面白そうな本を手に取って読んでみることは結構好きでやっていました。もちろん、この本を、と決めて読むこともあるのですが、偶然見つけて何となく面白そうと思って手に取った本は、視野を広げてくれたりするので好きです。
本を読むことで得られること
学生の皆さんには本をたくさん読んで欲しいと思っています。たくさんというのは、自分の専門分野や好きな分野以外の本も読んで欲しいという意味なのですが、これは、自身の視野が広がり『入力』の種類が増えることにつながります。ロボティクスの分野で、何かニーズに対してこんなロボットを作ろうと考えるとき、創造性みたいなものが大事だと思うのですが、この創造性というのが何かというと、何もないところから新しいものがポンっと出てくるイメージを持つ方も多いかもしれませんが、昨年のお薦め本でもいくつか挙げたのですが、ロボットの著名な研究者の方も、「創造性とは様々な情報の統合である」というような言い方をされています。私も、そのように思っていまして、新しいものを作ったなと思っても結局は自身が持っている情報や経験の組み合わせであったりします。スティーブ・ジョブズさんの有名なスピーチのコネクティング ザ ドッツ(connecting the dots)と通じるものがあるかと思います。図書館で色々な本を読んでみるというのは、必ずしも今すぐ役に立つ、というのとは違うこともありますが、興味をもってインプットした情報は、そのうち自身の経験などと結びついて、何か新しいアイデアとしてポンっと出てくるということにつながると思っています。
一方で、本を読むことは結論だけが書かれているわけではありませんので、時間がかかることで、面倒に感じる人も多いかもしれません。ですが、大学での学習や研究のように、必ずしも唯一の正解があるわけではない課題に取り組んでいくうえでは、結論だけが大事なわけではありません。結論に至るまでの考えの過程や結論に至った根拠というものも大事で、本を1冊読むということは、著者のテーマに対する考え方などが順をおって丁寧に書かれており、それを追いながら、自身の考えと対比してじっくり整理してみるという、非常に良い時間の使い方だと思います。生成AIは非常に多くの情報の中から必要な情報を瞬時に提示してくれます。短時間で効率よく整理された情報を得るには便利なツールですが、本を読んで自分のペースで内容を嚙み砕き消化しながら頭の中で情報を整理していくのも、自分自身に考える力をつける上で重要なトレーニングではないかと思うのです。

処理するための各種参考書籍
充実した大学生活を送るために
大学入試の問題というのは、基本的に解のある問題を解きますし、高校までの学習はこうした訓練を中心に行われてきて、多くの新入生の方は答えがある問題を解くことに慣れていると思います。しかし、大学で扱う課題では、唯一の正解は無く、解決に向けてどうすればよいか自分なりの考えをまとめていく、そしてそれを他人に説明する、ということが増えていきます。そうしたときに、様々な視点から考えて一番良さそうなものを選んで自分で判断して試してみる、ということになります。本当にうまくいくか、やってみないとわからないということもあります。実際の社会における問題も多くの場合はそうであり、こうしたやり方に慣れてほしいと思います。そのための方法といいますか、準備として有効なものの一つは、様々なことに興味をもって、多くのことを自分自身にインプットするということになります。
読書も知識のインプットの一つの方法ですが、様々な経験もインプットです。大学には授業や授業以外の多様な課外の活動の機会がありますので、自身が楽しいと思えることを見つけて真剣に取り組んでみて、たくさんのインプットをしてほしいと思っています。

3Dプリンター