
- プロジェクトリーダー
- 理工学部ロボティクス学科 川村 貞夫 教授 (写真 中央左)
- グループリーダー
-
- 理工学部ロボティクス学科 平井 慎一 教授(写真 左)
- 生命科学部応用化学科 堤 治 教授(写真 左中)
- 理工学部ロボティクス学科 岡田 志麻 准教授(写真 中央右)
- 理工学部ロボティクス学科 馬 書根 教授(写真 右中)
- 理工学部ロボティクス学科 小澤 隆太 教授(写真 右)
有機材料が広げる柔らかく、軽く、小さいロボットの可能性
ロボティクス分野と材料工学分野が連携し
新規材料を使った新しいロボティクスを創造する
20世紀後半のコンピュータの発達と足並みをそろえるようにロボティクスは加速度的に進化を遂げてきました。いまや世界で100万台以上もの産業用ロボットが利用され、ものづくりの現場になくてはならないものとなっています。しかしその一方でロボティクスにおける根本的な課題も浮き彫りになってきました。その最たるものが金属材料を使った剛体を基盤とするロボットの実現方法です。構造材、センサ、アクチュエータのいずれの材料にも金属が使われるため、ロボットは硬く、重く、大きくなる上、関節部の柔軟性や滑らかな動きにも限界があり、こうしたデメリットが多様な分野への展開を阻んでいます。本研究プロジェクトでは、金属材料に代わる先端材料を導入することでロボティクスを基礎理論から再構築するとともに機構設計や制御、利用方法を刷新し、課題の解決を目指しています。
本研究プロジェクトの強みの一つは、ロボティクス分野の研究者に加え、これまでに例のない材料工学の研究者が参画していることです。このような連携を通じて新しいロボティクスを創造できると期待しています。
ロボティクス分野になかった有機材料を使って
柔らかいアクチュエータや小型センサを開発する
本研究プロジェクトでは、6つのグループに分かれて研究を進めます。まず各グループの研究開発の要となる新規材料の開発・提供を担うのが、堤グループです。堤はこれまで高分子や分子集合体を基盤材料に用いて光・電子機能材料の開発に取り組んできました。その成果を生かし、ロボットの軽量化、小型化、柔軟化に貢献する有機材料の開発を進めています。その一つとして力点を置くのが、液晶です。堤は刺激を与えると凝集構造が変化するという液晶の性質を利用し、外部刺激によって発光色が変化する材料の開発に成功する他、フォトクロミック化合物を用いた光応答性の液晶材料も開発しています。本グループではこれらの技術を利用してナノスケールの応力センサや圧力センサを開発し、ロボットへの実装を検討します。またロボットを動かす粘性・弾性要素を担う新有機材料も開発していきます。
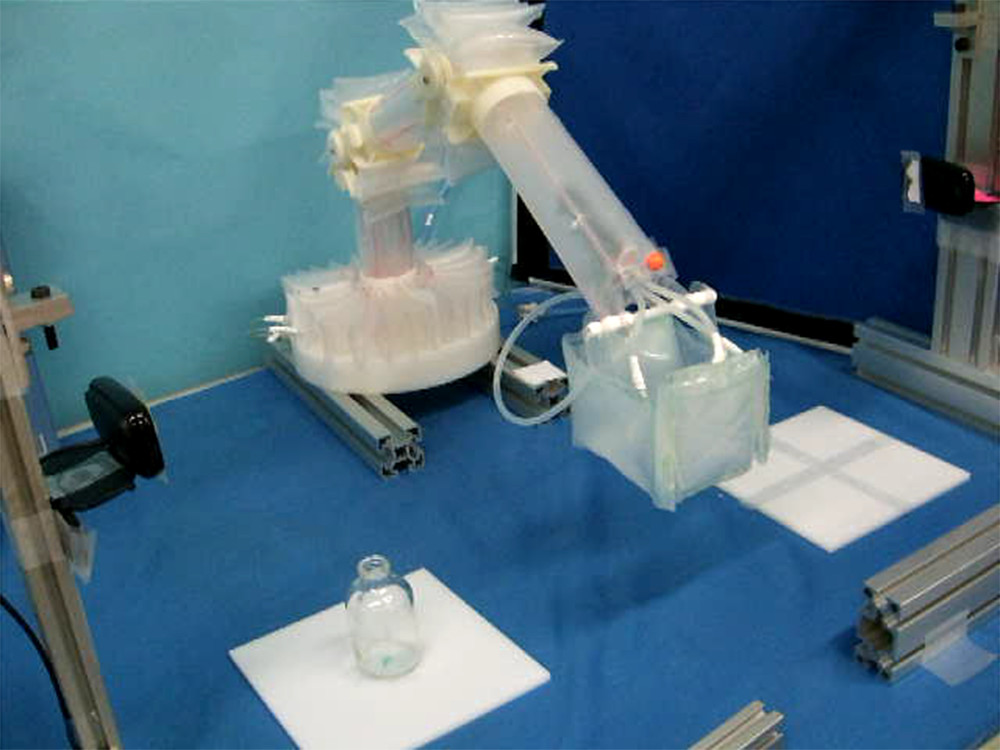
続いて川村グループでは、これまでロボティクス分野ではあまり利用されてこなかった高分子材料を用いて「オールプラスチック」のロボットを実現しようとしています。川村は、すでにプラスティック膜材料を使った極軽量、柔軟な空気圧駆動インフレータブルロボットアームを完成させるなど、金属材料を使わない機構や制御法の開発で実績を重ねています。本グループでは、ポリウレタン材料や圧電材料などを利用した柔軟な接触センサや力センサを開発しようとしています。いずれは精緻な位置制御や力の制御をすべて高分子材料で実現し、「オールプラスチック材料」のロボットアームの開発を目指します。

 次に平井グループでは、高分子材料を利用した「柔らかい」アクチュエータやロボット機構の開発に取り組んでいます。目下進めているのが「食品ハンドリング」技術の開発です。形状や固さが多様な食品を掴むには、形状や位置のバラツキに対応すると同時に、食品をつぶさないよう掴む力にも精緻な制御を必要とします。平井は位置決め誤差を吸収する方法を開発することに加え、柔軟物の把持に適した把持方法を探索。張力や圧力によって糸の電気抵抗が変化する性質を持つ感圧導電糸を使い、物体をソフトに掴むロボットハンドの設計・製作に取り組んでいます。実現すれば、いまだ人の手によって行われている惣菜の弁当箱へのピッキング作業など食品加工現場の自動化に貢献できます。
次に平井グループでは、高分子材料を利用した「柔らかい」アクチュエータやロボット機構の開発に取り組んでいます。目下進めているのが「食品ハンドリング」技術の開発です。形状や固さが多様な食品を掴むには、形状や位置のバラツキに対応すると同時に、食品をつぶさないよう掴む力にも精緻な制御を必要とします。平井は位置決め誤差を吸収する方法を開発することに加え、柔軟物の把持に適した把持方法を探索。張力や圧力によって糸の電気抵抗が変化する性質を持つ感圧導電糸を使い、物体をソフトに掴むロボットハンドの設計・製作に取り組んでいます。実現すれば、いまだ人の手によって行われている惣菜の弁当箱へのピッキング作業など食品加工現場の自動化に貢献できます。
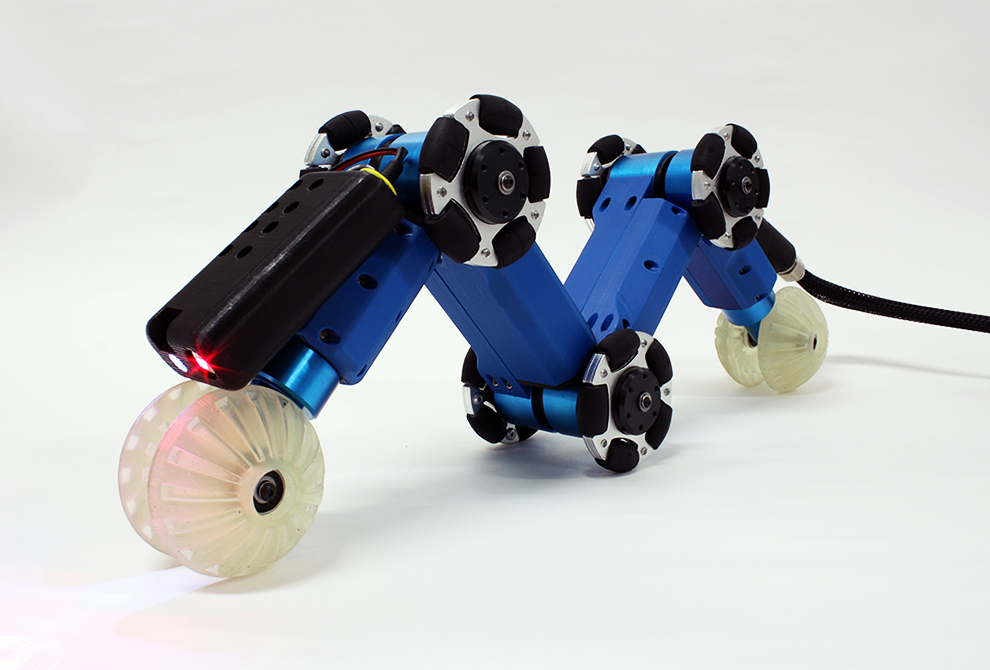 一方馬グループは、管内などの狭隘環境を進むヘビ型管内検査ロボットや、水中や泥水、ガレキなどの悪路にも対応できる移動ロボットなど、これまで「硬い」金属材料を使って自由度の高いロボットの開発に成功してきました。本グループでは、この「硬」機械金属要素に新素材の「軟」要素を取り入れることで、新しい可能性を追究します。関節部やアクチュエータ、本体フレームに剛体に代わって非線形粘弾性を持つ新素材を活用することで機能を高めたり、環境適応性を向上させる他、省アクチュエータ化、小型化・軽量化を実現しようとしています。加えて、新素材を使ったロボットを製造するのに欠かせない設計理論の確立も目指します。将来的には体内マイクロマシンなど極限まで小型化・軽量化したロボットの開発にも可能性を広げたいと考えています。
一方馬グループは、管内などの狭隘環境を進むヘビ型管内検査ロボットや、水中や泥水、ガレキなどの悪路にも対応できる移動ロボットなど、これまで「硬い」金属材料を使って自由度の高いロボットの開発に成功してきました。本グループでは、この「硬」機械金属要素に新素材の「軟」要素を取り入れることで、新しい可能性を追究します。関節部やアクチュエータ、本体フレームに剛体に代わって非線形粘弾性を持つ新素材を活用することで機能を高めたり、環境適応性を向上させる他、省アクチュエータ化、小型化・軽量化を実現しようとしています。加えて、新素材を使ったロボットを製造するのに欠かせない設計理論の確立も目指します。将来的には体内マイクロマシンなど極限まで小型化・軽量化したロボットの開発にも可能性を広げたいと考えています。
5つめの小澤グループでは、柔らかく軽量な先端材料をロボットシステムへ応用することで、高機能化を図ります。その代表として着目するのが、無人飛行艇(UAV)とロボットハンドです。材料分野との連携によって先端材料をこれらに導入することで、UAVに搭載可能な軽量なロボットアームやハンドを開発します。また、高分子材料などによって、作業の状況を把握できる皮膚を持ったロボットハンドや接触作業を滑らかに行うための柔らかな皮膚を持ったロボットハンドを開発し、高機能で柔らかなハンドリングやマニピュレーションの実現を目指します。
最後に岡田グループでは、開発された先端材料を十分に活用し、ソフトロボティクス技術による人支援機械システムの開発とその実用を考えます。まず、ソフトロボットによる人身体の位置/姿勢変化の科学と技術を構築します。特に、実利用として「睡眠」を対象として、快眠誘導によって心身の健康を増進するためのポリマーロボットの開発を進めています。次に、ヒトセンシングにおけるセンサ/アクチュエータ設置問題の解決を検討します。他のグループのソフトロボティクスの研究成果を人支援機械開発に結びつけます。さらに、他のグループの成果を活用して、ソフトロボティクス技術における直観的な操作のためのインターフェース開発を行います。このように、新材料、センサやアクチュエータ、ソフトロボットを研究する他グループと密に連携し、知見を共有しながら開発を進めています。
世界にまだない小型・軽量・柔軟なロボットを開発し
サービス、医療、エンターテインメントへ可能性を広げる
これまで連携のなかったロボット工学分野と材料工学分野が連携することで、単独ディシプリンでは決して生まれることのなかった新しい発想や新しい材料を創出し、ロボット開発にイノベーションを起こすことが目標です。さらにはこれらの研究を通じて、世界的にもまだ実現していない小型・軽量・柔軟なロボットのシステム統合の技術や科学を確立し、産業用ロボット分野のみならず、サービス、福祉、医療、生活支援、エンターテインメントなど新しい分野でのロボット利用と市場開拓の可能性を広げたいと考えています。
研究期間
2016年度〜2020年度
研究活動進捗・成果
本研究プロジェクトが目指す成果イメージ図





 PAGE TOP
PAGE TOP